PCM VGD-1KL基本參數
輸出插座:國標4個
電池類型:外接電池
PCM VGD-1KL造價信息
電池類型:外接電池
輸入電壓范圍:220V
輸入頻率范圍:50Hz
輸出電壓范圍:220±2%V
PCM VGD-1KL詳細參數切換到傳統表格版
輸入電壓范圍:220V
輸入頻率范圍:50Hz
輸出電壓范圍:220±2%V
輸出頻率范圍:50±0.5%Hz
PCM VGD-1KL基本參數常見問題
-
1、材類:鋅合金、鋼、 尼龍、鐵、不銹鋼2、表面處理:噴粉、鍍鋅合金、鍍鋅鋼、噴砂、鍍鉻鋅合金、鍍鎳鋼、拉絲和拋光等處理
-
Q=720m3/hH=49mn=1450rpmNPSHr=4.8m效率81%軸功率118.6kW配套電機160kw/4P
-
1型號根據QB 1563的規定編制,含義如下。O □ S-□ □-□□型式代號修改序號(以ABC…表示)規格(以噸為單位)示值型式(數字)傳力結構或轉換特征類別(吊秤)2規格用以噸為單位的最大量程表示...
噪音值(dBA):<40
外觀尺寸:410×155×235mm
產品重量:13kg
環境參數:溫度:0-40℃,濕度:≤95%[(40±2)℃,無凝露]
保修政策:全國聯保,享受三包服務
質保時間:1年
詳細內容:產品自售出之日起7天內,產品在正常使用狀況下,發生功能性故障,顧客憑有效票及三包憑證可選擇退貨、換貨或維修。產品自售后之日起15天內,產品在正常使用狀況下,發生功能性故障,顧客憑有效發票及三包憑證可選擇換貨或維修。產品在正常使用狀況下,實行"整機保修1年"政策。維修更換保外零件可免費保修90天,由維修網點負責。
PCM VGD-1KL基本參數文獻

 電動裝置基本參數
電動裝置基本參數
格式:pdf
大小:15KB
頁數: 2頁
評分: 4.3
電動裝置基本參數 閥門電動裝置是實現閥門程控、自控和遙控不可缺少的驅動設備,其運動過程可由行程、 轉矩或軸向推力的大小來控制。由于閥門電動裝置的工作特性和利用率取決于閥門的種類、 裝置工作規范及閥門在管線或設備上的位置。 電動裝置一般由下列部分組成: 專用電動機,特點是過載能力強﹑起動轉矩大﹑轉動慣量小,短時﹑斷續工作。 減速機構,用以減低電動機的輸出轉速。 行程控制機構,用以調節和準確控制閥門的啟閉位置。 轉矩限制機構,用以調節轉矩 (或推力 )并使之不超過預定值。 手動﹑電動切換機構,進行手動或電動操作的聯鎖機構。 開度指示器,用以顯示閥門在啟閉過程中所處的位置。 一、根據閥門類型選擇電動執行器 1.角行程電動執行器(轉角 <360 度) 適用于蝶閥、球閥、旋塞閥等。 電動執行器輸出軸的轉動小于一周, 即小于 360 度,通常為 90 度就實現閥門的啟閉過程控 制。此類電動執行器
 起重機的基本參數
起重機的基本參數
格式:pdf
大小:15KB
頁數: 7頁
評分: 4.6
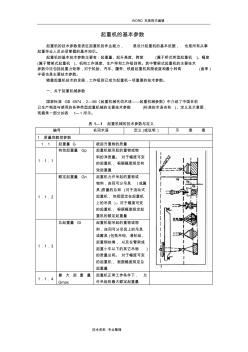
.WORD 完美格式編輯 . 技術資料 .專業整理 起重機的基本參數 起重機的技術參數是表征起重機的作業能力, 是設計起重機的基本依據, 也是所有從事 起重作業人員必須掌握的基本知識。 起重機的基本技術參數主要有:起重量、起升高度、跨度 (屬于橋式類型起重機 )、幅度 (屬于臂架式起重機 )、機構工作速度、生產率和工作級別等。其中臂架式起重機的主要技術 參數中還包括起重力矩等,對于輪胎、汽車、履帶、鐵路起重機其爬坡度和最小轉彎 (曲率 ) 半徑也是主要技術參數。 隨著起重機技術的發展,工作級別已成為起重機一項重要的技術參數。 一、關于起重機械參數 國家標準 GB 6974.2—86《起重機械名詞術語——起重機械參數》中介紹了中國目前 已生產制造與使用的各種類型起重機械的主要技術參數 (標準的術語名稱 )、定義及示意圖, 現摘錄一部分如表 1—1 所示。 表 1—1 起重機械的技術參數與定
在PCM/FM遙測體系中,發射端由信息采集器、PCM編碼器和調頻發射機組成。信息采集器將各種模擬信號轉化為數字信號,PCM編碼器按照一定的準則將數字信號轉化為二進制非歸零碼。調頻信號的調制是將經過碼型變換和插值的PCM信號通過預調濾波器后對載波進行頻率調制。發射端將己調制信號由天線發射,經過無線遙測信道傳輸后到達接收天線,接收端對接收到的遙測信號進行解調并采樣后輸出二進制PCM信號,然后將PCM信號輸送到數據恢復模塊。數據恢復系統包括PCM解調器和信息處理,經數據處理即可獲得原始發送信號。如圖2所示為一個PCM/FM遙測系統的結構框圖。
PCM系統相對于其他調制系統的優越性在于:首先,PCM系統有較高的能量效率和較強的靈活性。較高的能量效率使得可以在一定的發射功率下,傳輸更多的數據;較強的靈活性可以適應各種存儲手段和可編程遙測系統。其次,PCM系統有較好的噪聲性能和較高的通信可靠性,具有同時處理模擬信號和數字信號的能力。PCM系統的編碼可以很方便地加入檢錯碼或糾錯碼來提高系統的抗干擾性,而且對系統電路的非線性失真要求較低。另外,再入遙測中廣泛使用的PCM系統應稱為PCM/FM系統。因此系統就具有了抗干擾性強和發射機效率高等優點。
脈沖編碼調制就是利用脈沖的有無組合來傳遞信息。其設想是:首先,每隔適當的時間間隔對信號抽樣,抽取其瞬時幅度;然后將各抽樣點的幅度以適當的精細度劃分為若干區間,并量出其區間數;最后將此區間數變換為相應的脈沖有無的組合。上述三個過程分別稱為:采樣、量化和編碼。
對模擬信號進行采集、抽樣、量化、編碼,變為數字信號是進行數字處理前提。參數的數據采集及PCM編碼的完成都通過數據采集系統來實現,典型的PCM遙測數據采集系統的基本組成如圖1所示。
多路模擬信號經過信號匹配器饋送到多路交換子。信號匹配器的主要作用是防止或減輕各種噪聲對交換子輸入的影響、調節信號電平、限制信號頻帶,當輸入信號不正常時提供保護措施。交換子的作用是按順序對輸入到遙測系統的信號進行采樣,實現多路復用。
采樣保持電路使正在取樣的模擬值在采樣期間保持為一個固定的電平。接收信號被送到模/數(A/D)轉換器,其后變成二進制數字序列輸入到控制相加電路。
在控制相加電路里,二進制數字序列與同步碼發生器產生的特殊碼組,以及直接輸入的、被測數字信號按一定規律排列成PCM數據序列。
PCM程序器提供數據采集系統所有的定時和控制信號。它由時鐘、及時邏輯、譯碼邏輯等部分組成。它輸出的定時控制信號被送入到多路交換子、采樣保持電路、A/D轉換器、控制相加電路等,使它們按規定程序工作。
同步碼發生器提供一組用于數據同步的特殊碼組,稱為幀同步碼,它在控制相加電路與輸入數據一起被安排在確定的位置上。
上述數據經過信道編碼和數據加密等進一步變化,形成經過加密的抗干擾能力強的PCM遙測信號。最后,碼型變換器將這些PCM遙測信號變化成適合傳輸的形式輸入到射頻傳輸系統。
PCM VGD-1KL相關推薦
- 相關百科
- 相關知識
- 相關專欄
- PAN HP1KL
- 新境界多功能移動電源/外掛電池
- 低壓電力應急電源車通用技術要求
- 風電閉鎖裝置
- 泰興DXS系列40KVA
- 表示燈電源
- ANEN-SA175電源連接器
- hd22005-3
- HD22005-3A
- 電源環線
- 松威特SV-H6130
- 山特A UPS-16K
- 三相負載
- 半導體點溫計
- 硒鼓更換
- 靜電球
- 機械工業部頒布高真空插板閥型式與基本參數等部標準
- WBS在風力發電場項目總承包管理EPCM中的應用
- 日立電梯基本參數(20200929152539)
- 機械攪拌澄清池攪拌機基本參數和尺寸計算規定
- 微型計算機系統在全塑PCM電纜自動測試中的應用
- 噴灌用塑料管基本參數及技術條件低密度聚乙烯管
- 噴灌用塑料管基本參數及技術條件
- 室內設計家具尺寸和VR材質基本參數
- PCM反應粘結型高分子自粘防水卷材施工方案
- 施耐德塑殼斷路器NSX基本參數PPT學習課件
- PCM聚合物水泥砂漿及混凝土治理滲漏的工藝
- 家用和類似用途單相插頭插座型式、基本參數和尺寸
- 新型三層玻璃單元與PCM墻體結合性能
- 建筑高大空間場所采用濕式系統的設計基本參數
- 建設工程EPC模式與EPCM模式的比較分析
- 與印尼建筑抗震設計地震基本參數對比
最新詞條
安徽省政采項目管理咨詢有限公司
數字景楓科技發展(南京)有限公司
懷化市人民政府電子政務管理辦公室
河北省高速公路京德臨時籌建處
中石化華東石油工程有限公司工程技術分公司
手持無線POS機
廣東合正采購招標有限公司
上海城建信息科技有限公司
甘肅鑫禾國際招標有限公司
燒結金屬材料
齒輪計量泵
廣州采陽招標代理有限公司河源分公司
高鋁碳化硅磚
博洛尼智能科技(青島)有限公司
燒結剛玉磚
深圳市東海國際招標有限公司
搭建香蕉育苗大棚
SF計量單位
福建省中億通招標咨詢有限公司
泛海三江
威海鼠尾草
Excel 數據處理與分析應用大全
廣東國咨招標有限公司
甘肅中泰博瑞工程項目管理咨詢有限公司
山東創盈項目管理有限公司
當代建筑大師
廣西北纜電纜有限公司
拆邊機
大山檳榔
上海地鐵維護保障有限公司通號分公司
甘肅中維國際招標有限公司
舌花雛菊
華潤燃氣(上海)有限公司
湖北鑫宇陽光工程咨詢有限公司
GB8163標準無縫鋼管
中國石油煉化工程建設項目部
韶關市優采招標代理有限公司
莎草目
建設部關于開展城市規劃動態監測工作的通知
電梯平層準確度
廣州利好來電氣有限公司
四川中澤盛世招標代理有限公司