VLST-CAD中圖形處理算法及其固化技術研究基本信息
| 批準號 |
69136024 |
| 項目名稱 |
VLST-CAD中圖形處理算法及其固化技術研究 |
| 項目類別 |
重點項目 |
| 申請代碼 |
F0402 |
| 項目負責人 |
唐璞山 |
| 負責人職稱 |
教授 |
| 依托單位 |
復旦大學 |
| 研究期限 |
1992-01-01 至 1995-12-31 |
| 支持經費 |
10(萬元) |
VLST-CAD中圖形處理算法及其固化技術研究造價信息
本課題研究版圖驗證(以DRC為例)的一些主要算法的固化。包括數據排隊算法和圖形的各種邏輯操作算法。主要創新是這些算法用硬件實現(即所謂固化),這類專用硬件作為主機的協處理器工作,本課題所用的硬件是FPGA實際的結果表明算法固化后的運算速度對數據排隊算法比軟件實現快25倍,對于邏輯操作算法(用線掃描法)固化后的速度比軟件實現快50倍,其結果使版圖驗證速度大提高,也即可以驗證規模更大的VLS版圖。此外本課題尚做了連機DRC的系統開發,該系統做到版圖輸入后能即時進行DRC檢查。 2100433B
VLST-CAD中圖形處理算法及其固化技術研究基本信息常見問題
-
租售狀態: 出售開 發 商: 北京天亞物業開發有限公司投 資 商: ----占地面積: 11800.00平方米總建筑面積: 100000.00平方米詳細信息售 樓 處: 北京市朝陽區光華路嘉裹中心飯店...
-
行政區域:新香洲項目位置:位于香洲區星園路3號(民西路與三臺石路交匯處)交通狀況:11條公交線路1、5、6、8、15、22、43、56、68、602、204主力戶型:95-210平方米三房四房開發商:...
-
行政區域:惠城區區域板塊:下角項目位置:惠城區江南下角中路26號(原機械廠)交通狀況:惠城區1、15、16、19路公交車至機械廠站下,即達項目。主力戶型:二居56平米,三居80平米開發商:惠州市鵬達實...
VLST-CAD中圖形處理算法及其固化技術研究基本信息文獻

 建筑物基本信息
建筑物基本信息
格式:pdf
大小:23KB
頁數: 1頁
評分: 4.6
建筑物基本信息 參數名 必填 描述 項目實際情況 建筑代碼 數據中心代碼 建筑名稱 必填 最多24個漢字 建筑字母別名 必填 建筑首字母大寫 建筑業主 必填 有多位業主時存主要業主名稱,外加 “等××位” 建筑監測狀態 狀態 1- 啟用監測 0- 停用監測 所屬行政區劃 必填 6位行政區劃代碼 建筑地址 必填 最多40個漢字 建筑坐標 -經度 建筑坐標 -緯度 建設年代 必填 4位數字年份 地上建筑層數 必填 整數 地下建筑層數 整數 建筑功能 必填 A- 辦公建筑 B- 商場建筑 C- 賓 館飯店建筑 D- 文化教育建筑 E- 醫療衛生建筑 F- 體育建筑 G- 綜 合建筑 H- 其它建筑 建筑總面積 必填 空調面積 必填 采暖面積 必填 建筑空調系統形式 必填 A- 集中式全空氣系統 B- 風機盤管 +新風系統 C- 分體式空調或 VRV的 局部式機組系統 Z
 塔吊基本信息
塔吊基本信息
格式:pdf
大小:23KB
頁數: 5頁
評分: 4.7
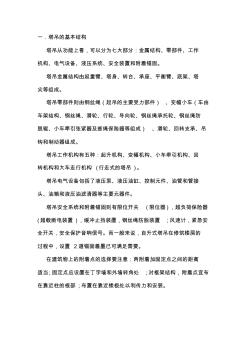
一.塔吊的基本結構 塔吊從功能上看,可以分為七大部分:金屬結構、零部件、工作 機構、電氣設備、液壓系統、安全裝置和附著錨固。 塔吊金屬結構由起重臂、塔身、轉臺、承座、平衡臂、底架、塔 尖等組成。 塔吊零部件則由鋼絲繩(起吊的主要受力部件) 、變幅小車(車由 車架結構、鋼絲繩、滑輪、行輪、導向輪、鋼絲繩承托輪、鋼絲繩防 脫輥、小車牽引張緊器及斷繩保險器等組成) 、滑輪、回轉支承、吊 鉤和制動器組成。 塔吊工作機構有五種:起升機構、變幅機構、小車牽引機構、回 轉機構和大車走行機構 (行走式的塔吊 )。 塔吊電氣設備包括了液壓泵、液壓油缸、控制元件、油管和管接 頭、油箱和液壓油濾清器等主要元器件。 塔吊安全系統和附著錨固則有限位開關 (限位器 ),超負荷保險器 (超載斷電裝置 ),緩沖止擋裝置,鋼絲繩防脫裝置 ;風速計,緊急安 全開關,安全保護音響信號。而一般來說,自升式塔吊在修筑樓房的 過程中
DFSA算法可采用各種方法預測待識別的標簽數量,然后動態調整最優幀長,與FSA相比,系統效率有明顯改善,接近36.8%。但是,當標簽數量較多(特別是標簽數量大于500)時,采用由預測標簽數量設置最優幀長的方案會使系統效率急劇下降。因此,在標簽數量較多的情況下,為了使系統效率得到提高,EPCClass1Gen2標準中采用了Q值算法,該算法可以實時自適應地調整幀長 。
Q值算法
在Q值算法中,閱讀器首先發送Query命令,該命令中含有一個參數Q(取值范圍0~15),接收到命令的標簽可在[0,2Q-1]范圍內(稱為幀長)隨機選擇時隙,并將選擇的值存入標簽的時隙計數器中,只有計數器為0的標簽才能響應,其余標簽保持沉默狀態。當標簽接收到閱讀器發送的QueryRep命令時,將其時隙計數器減1,若減為0,則給閱讀器發送一個應答信號。標簽被成功識別后,退出這輪盤存。當有兩個以上標簽的計數器都為0時,它們會同時對閱讀器進行應答,造成碰撞。閱讀器檢測到碰撞后,發出指令將產生碰撞的標簽時隙計數器設為最大值(2Q-1),繼續留在這一輪盤存周期中,系統繼續盤存直到所有標簽都被查詢過,然后閱讀器發送重置命令,使碰撞過的標簽生成新的隨機數 。
根據上一輪識別的情況,閱讀器發送Query-Adjust命令來調整Q的值,當標簽接收到Query-Adjust命令時,先更新Q值,然后在[0,2Q-1]范圍內選擇隨機值。EPCClass1Gen2標準中提供了一種參考算法來確定Q值的范圍.其中:Qfp為浮點數,其初值一般設為4.0,對Qfp四舍五入取整后得到的值即為Q;C為調整步長,其典型取值范圍是0.1 該算法在參數C的輔助下對Q值進行動態調整,但是C太大會造成Q值變化過于頻繁,導致幀長調整過于頻繁,C太小又不能快速地實現最優幀長的選擇。因此,研究者們對Q值的調整進行了各種優化 。 基于最大吞吐量調整Q值的算法 文獻提出一種基于最大吞吐量對Q值進行調整的算法,其中定義了以下變量:Nt為已識別的標簽個數;N為識別標簽所需的總時隙數;NC為沖突時隙的個數;nu為上一輪未識別的標簽個數;e為沖突時隙中的平均標簽個數;PC為沖突時隙所占的比例 。 這些參數之間的關系為PC=NC/N,e=nu/Nc,吞吐量=Nt/N。由于Aloha類算法的最大吞吐量為0.368(e-1)[5],該算法以此作為調整Q值的依據。當系統吞吐量達到或接近0.368時,閱讀器僅需調用2Q-1次QueryRep命令,而不需要在接下來的盤存周期中調整Q值。當吞吐量小于0.368時,根據未識別的標簽個數nu來調整Q值 . 基于分組的位隙Aloha算法 文獻提出一種基于分組的位隙Aloha算法,該算法采用位隙Aloha算法中的128位預定序列,代表128個位隙。若某個標簽選擇了第i個位隙,則將第i位置1,其余各位都置0。當標簽數量為15時,位隙Aloha算法可獲得最大吞吐率88.38%,但隨著標簽數量的增加,算法性能急劇下降 。 因此,基于分組的位隙Aloha算法通過對標簽進行分組來提高算法的性能。該算法在查詢命令中設置了一個位隙計數器的參數Q(Q為整數,且0≤Q≤15),當標簽收到閱讀器發送的查詢命令后,在[0,2Q-1]范圍內生成一個隨機數,即代表選擇了相應的位隙,只有選擇了0的標簽才會立即響應。同時,該算法根據沖突位隙數動態地對Q值進行調整:當沖突位隙數小于11時,Q減1且最小為0;當沖突位隙數在11~20之間時,Q保持不變;當沖突位隙數大于20時,Q加1且最大不超過15 。 綜上所述,基于Aloha的防碰撞算法原理簡單、容易實現,對新到達的標簽具有較好的適應性,尤其對于標簽持續到達的情況有較好的解決方案,但該類算法存在幾個明顯的缺點:①響應時間不確定,即同一批標簽在不同時刻進行識別所需要消耗的時間相差很大;②個別標簽可能永遠無法被識別;③Aloha算法達到最佳吞吐率的條件是其幀長等于標簽數量,當需要識別的標簽數量較多或選擇的幀長與實際待識別標簽數量不符時,系統性能將明顯下降。而基于樹的算法則很好地解決了這些問題 。
《智能控制算法及其應用》主要介紹各種典型智能控制算法的基本內容、設計與實現方法及其在函數優化、電力系統中的應用。《智能控制算法及其應用》首先闡述智能、智能控制的基本概念,介紹智能控制與傳統的經典控制理論、現代控制理論的聯系和區別。然后從四種典型智能控制算法(專家系統、模糊控制、神經網絡和進化計算)入手分別闡述它們的發展歷史、基本內容、實現方法及其應用。最后介紹混沌模擬退火動態煙花優化算法,并將其用于優化離散時間微分平坦自抗擾控制律的參數,通過計算機仿真和基于智能優化算法試驗平臺開展試驗以驗證該算法的有效性;介紹遞減步長果蠅優化算法,并將其應用于風電機組齒輪箱的故障診斷;介紹云粒子群布谷鳥融合算法,通過聯合循環發電機組典型熱工過程模型參數辨識實例驗證該算法的有效性。
《分布并行圖形繪制技術及其應用》系統深入地介紹了分布并行圖形繪制的基礎知識、體系結構和多種繪制加速算法以及典型的應用系統,分為基礎篇、技術篇和應用篇,共15章的內容。《分布并行圖形繪制技術及其應用》可作為并行圖形繪制、分布式虛擬現實、高性能圖形繪制等方向的研究生教材以及技術參考書,同時可供研究并行繪制技術和分布式虛擬現實技術的師生和從事高性能圖形繪制技術的研發人員參考。
VLST-CAD中圖形處理算法及其固化技術研究相關推薦
- 相關百科
- 相關知識
- 相關專欄
- VMA
- Voir
- VOLVO建筑設備集團
- VR建筑設計
- VRay超寫實室內效果圖渲染技術全解
- VRV系統
- VST篩板塔
- W型火焰燃燒自然循環鍋爐
- W型火焰鍋爐
- W系列:住宅建筑(英文版)
- W系列:辦公建筑
- W系列:辦公建筑(英文版)
- W系列:文化場館(英文版)
- WA中國建筑獎
- WACF建筑監理師
- Waters Edge
- 電氣工程及其自動化特色專業建設探索
- 分形DGS單元結構設計及其在微帶電路中的應用
- 在生活中構筑自然——河南天旺園林工程有限公司剪影
- 中國機械工程學會授予材料熱處理工程師資格人員名單
- 有源配電網設備利用率影響因子體系及其價值計算方法
- 應對水源突發污染的城市供水應急處理技術與應用
- 一體式膜-生物反應器中膜面污泥沉積速率及其影響因
- 有關建筑工程造價管理面臨的問題與其處理手段
- 滲透型建筑物硅橡膠防水涂料的制備工藝及其制品
- 智能微電網集成關鍵技術研發及其產業化項目通過驗收
- 醫用潔凈空調系統設計調試中易忽視的問題及設計優化
- 醫院污水處理設施竣工驗收申請報告
- 在地鐵建設、運營中屏蔽門系統與相關專業的接口分析
- 云南大平糜棱巖化堿性花崗巖的鋯石特征及其地質意義
- 影響常溫固化FEVE氟碳涂料耐酸堿性能的因素
- 一體化載體循環生物處理設備處理生活污水的中試
最新詞條
安徽省政采項目管理咨詢有限公司
數字景楓科技發展(南京)有限公司
懷化市人民政府電子政務管理辦公室
河北省高速公路京德臨時籌建處
中石化華東石油工程有限公司工程技術分公司
手持無線POS機
廣東合正采購招標有限公司
上海城建信息科技有限公司
甘肅鑫禾國際招標有限公司
燒結金屬材料
齒輪計量泵
廣州采陽招標代理有限公司河源分公司
高鋁碳化硅磚
博洛尼智能科技(青島)有限公司
燒結剛玉磚
深圳市東海國際招標有限公司
搭建香蕉育苗大棚
SF計量單位
福建省中億通招標咨詢有限公司
泛海三江
威海鼠尾草
廣東國咨招標有限公司
Excel 數據處理與分析應用大全
甘肅中泰博瑞工程項目管理咨詢有限公司
山東創盈項目管理有限公司
拆邊機
當代建筑大師
廣西北纜電纜有限公司
大山檳榔
上海地鐵維護保障有限公司通號分公司
舌花雛菊
甘肅中維國際招標有限公司
華潤燃氣(上海)有限公司
湖北鑫宇陽光工程咨詢有限公司
GB8163標準無縫鋼管
中國石油煉化工程建設項目部
韶關市優采招標代理有限公司
莎草目
建設部關于開展城市規劃動態監測工作的通知
電梯平層準確度
廣州利好來電氣有限公司
蘇州弘創招投標代理有限公司