




 消防滅火機(jī)器人的設(shè)計(jì)與研究
消防滅火機(jī)器人的設(shè)計(jì)與研究 消防滅火機(jī)器人的設(shè)計(jì)與研究
格式:pdf
大小:103KB
頁數(shù):未知
滅火機(jī)器人可以替代人類在一些高危環(huán)境下作業(yè),避免人員傷亡.機(jī)器人以單片機(jī)為控制核心,加以電源電路、電機(jī)驅(qū)動、避障前進(jìn)系統(tǒng)、火焰檢測電路、滅火系統(tǒng)以及其它電路構(gòu)成.電源電路提供系統(tǒng)所需的工作電源,專用電機(jī)驅(qū)動芯片驅(qū)動電機(jī)控制機(jī)器人的前進(jìn)后退以及轉(zhuǎn)向,避障前進(jìn)系統(tǒng)完成尋跡和避障,光敏電阻傳感器檢測火焰,滅火系統(tǒng)進(jìn)行滅火.
編輯推薦下載

機(jī)器人實(shí)驗(yàn)報(bào)告
格式:pdf
大小:457KB
頁數(shù):6P
 4.5
4.5
1 機(jī) 器 人 實(shí) 驗(yàn) 報(bào) 告 冊 制作人:葉翔徐培嘉陳琳 制作日期:2012年12月 2 目錄 1、中國機(jī)器人大賽雙足競步機(jī)器人比賽規(guī)則簡述............3 2、雙足競步機(jī)器人構(gòu)成簡介.......................3 3、功能及其改進(jìn)方案簡介.........................4 4、設(shè)計(jì)與制作軟件簡介...........................4 5、比賽功能簡介.................................5 6、制作心得體會.................................6 3 一、中國機(jī)器人大賽雙足競步機(jī)器人比賽規(guī)則簡述 1、交叉足印競步機(jī)器人: 結(jié)構(gòu)只有雙足、并只能以走路的方式來移動,機(jī)器人要分清楚正面及背面, 以箭頭方向作為正面,是自主式脫線控制,用
iPad專用機(jī)器人支架誕生 iPad專用機(jī)器人支架誕生
格式:pdf
大小:289KB
頁數(shù):1P
4.6
美國創(chuàng)業(yè)公司doublerobotics開發(fā)了一款名為double的機(jī)器人。它由一部ipad、一個(gè)支架和電動兩輪底座組成,支持遠(yuǎn)程操縱,能實(shí)現(xiàn)前進(jìn)、轉(zhuǎn)彎等動作,可以在公司或家里使用。它能伸展至5英尺高,或折疊至5.6英尺,從而模擬操縱者的站姿或坐姿。doubletelepresencerobot目前售價(jià)1999美元,折合人民幣約12477元,對于那種公事繁忙,又抽不出身去參加各種會議的大佬們來說,這個(gè)東西真的是個(gè)不錯的貼心寶貝。
委托書機(jī)器人消防車熱門文檔


6關(guān)節(jié)機(jī)器人技術(shù)論文
格式:pdf
大小:33KB
頁數(shù):3P
4.7
1 1、工業(yè)領(lǐng)域中一般多用6關(guān)節(jié)型機(jī)器人,根據(jù)所學(xué)內(nèi)容談?wù)?該種機(jī)器人都有哪些部件組成,每個(gè)部件的工作原理及選擇 該部件的依據(jù)(800字以上) 目前各大工業(yè)機(jī)器人廠商提供的六軸關(guān)節(jié)機(jī)器人結(jié)構(gòu)從外觀上看大同小異,相差不大,從本 質(zhì)上來說,其結(jié)構(gòu)應(yīng)該都是一致的,即其第一關(guān)節(jié)旋轉(zhuǎn)軸(基座旋轉(zhuǎn)軸)、第四關(guān)節(jié)旋轉(zhuǎn)軸、 第六關(guān)節(jié)旋轉(zhuǎn)軸(手腕端部法蘭安裝盤的旋轉(zhuǎn)中心)在同一個(gè)平面內(nèi);第二關(guān)節(jié)旋轉(zhuǎn)軸、第 三關(guān)節(jié)旋轉(zhuǎn)軸以及第五關(guān)節(jié)旋轉(zhuǎn)軸互相平行,而且與前面提到到平面垂直;另外,還需要保 證第四關(guān)節(jié)旋轉(zhuǎn)軸線、第五關(guān)節(jié)旋轉(zhuǎn)軸線以及第六關(guān)節(jié)旋轉(zhuǎn)軸線相交于一點(diǎn)。采用該種結(jié)構(gòu) 的工業(yè)機(jī)器人可以使得其運(yùn)動學(xué)算法最為簡單可靠。設(shè)計(jì)的機(jī)器人要保證高的定位精度,就 必須盡可能的滿足上述條件,通過機(jī)械加工及裝配精度來保證最終的機(jī)器人運(yùn)行精度控制在 一定范圍內(nèi)。如果機(jī)器人的結(jié)構(gòu)與此差別較大的話

abb機(jī)器人仿真步驟
格式:pdf
大小:2.6MB
頁數(shù):12P
4.4
作圖步驟: 1、雙擊桌面robotstudio5.15圖標(biāo),如下圖所示。 點(diǎn)擊左側(cè)選項(xiàng)欄,選擇授權(quán)。 然后選擇激活向?qū)Вx擇如下: 2、點(diǎn)擊創(chuàng)建文件,出現(xiàn)如下界面。 3、選擇機(jī)器人模型,點(diǎn)擊abb模型庫,出現(xiàn)如下界面,選擇irb2600.把承重能力改為20kg. 4、然后點(diǎn)擊導(dǎo)入模型庫,下拖選擇mytool后,然后把左側(cè)邊mytool工具拖到 irb2600-20-165-01,機(jī)器人上自動安裝了噴頭工具。 5、然后點(diǎn)擊機(jī)器人系統(tǒng)菜單,選擇從布局創(chuàng)建系統(tǒng)。 在此項(xiàng)目中,可以在名稱處修改系統(tǒng)的名稱,尤其在系統(tǒng)多的情況下。在主菜單中,一定要 修改工具,把原始的tool10改為mytool。或者,在放入機(jī)器人時(shí),即完成此項(xiàng)設(shè)置,可以 不需要修改此項(xiàng)。 一直選擇下一個(gè),即可成功。 成功后,屏幕右下角變?yōu)榫G色。 5、選擇建模,在菜單中選擇固體,再選擇矩形體。
機(jī)器人幫她消除寂寞 機(jī)器人幫她消除寂寞
格式:pdf
大小:73KB
頁數(shù):1P
4.7
沒想到養(yǎng)老這么快就與高科技關(guān)聯(lián)上了。這些日子,我關(guān)注了一下養(yǎng)老院,有不少見聞。其中一位、住進(jìn)養(yǎng)老院的柯老人是被住進(jìn)來的。這個(gè)“被”字有勉強(qiáng)的意思,從主觀上說是不情愿、無奈、沒法子才來這里的,到這里來是“華山一條路”。原因是她已喪偶,又與兒女徹底鬧翻,且性格固執(zhí)倔強(qiáng).于是毅然決然地賣了北京的房子,揣著房款到這里來住。
滅火機(jī)器人
格式:pdf
大小:27KB
頁數(shù):4P
4.3
滅火機(jī)器人 機(jī)器人這個(gè)概念早已家喻戶曉,它是自動執(zhí)行工作的機(jī)器裝置,可以協(xié)助或者取代人類從 事多種工作。由機(jī)器人來代替人類在危險(xiǎn)的工作環(huán)境中工作,尤其是特殊緊急險(xiǎn)情等危害公 共安全時(shí),機(jī)器人發(fā)揮著越來越重要的作用。本文僅就消防機(jī)器人在國內(nèi)外的發(fā)展現(xiàn)狀做簡 要介紹,并對消防機(jī)器人在實(shí)際中的應(yīng)用及改進(jìn)方向做較為詳盡的闡述,供廣大同仁參考。 “機(jī)器人”一詞問世以來,一直成為高科技高尖端的代名詞。世界發(fā)達(dá)國家均在機(jī)器人 的研發(fā)上投入大量的人力財(cái)力。機(jī)器人是自動執(zhí)行工作的機(jī)器裝置,可以協(xié)助或者取代人類 從事多種工作。近年來,機(jī)器人已經(jīng)在很多國家的多個(gè)行業(yè)逐步代替了手工,是人力資源匱乏 國家解決勞動力問題的上佳選擇。而由機(jī)器人來代替人類在危險(xiǎn)的工作環(huán)境中工作,尤其是 危害公共安全的火災(zāi)、毒氣、爆炸等特殊緊急險(xiǎn)情時(shí),機(jī)器人發(fā)揮著越來越重要的作用。消 防事業(yè)直接服務(wù)于經(jīng)濟(jì)建設(shè),高
委托書機(jī)器人消防車精華文檔
機(jī)器人打造纖維建筑
格式:pdf
大小:2.1MB
頁數(shù):2P
4.7
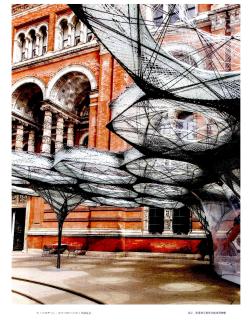
如果機(jī)器人生產(chǎn)工藝流行開來、那么諸如“工匠”“手工藝”這樣的詞匯或許很快就會過時(shí)。在倫敦維多利亞和阿爾伯特博物館外,矗立著一個(gè)戶外展亭,其結(jié)構(gòu)由斯圖加特大學(xué)的建筑師和工程師根據(jù)甲蟲外殼設(shè)計(jì),這種外殼韌性超強(qiáng)、重量很輕,具有保護(hù)作用。
高層建筑消防機(jī)器人的機(jī)構(gòu)研究與分析
格式:pdf
大小:657KB
頁數(shù):3P
4.5
結(jié)合高層建筑火災(zāi)現(xiàn)場的特殊條件,介紹了高層建筑消防救災(zāi)機(jī)器人的整體運(yùn)作機(jī)理以及各主要功能部件的機(jī)構(gòu)組成和工作原理。該機(jī)器人可以實(shí)現(xiàn)在保持姿態(tài)不變的條件下,攜帶一定數(shù)量的救生物品和滅火工具快速運(yùn)動到壁面目標(biāo)位置進(jìn)行破障救生和火情探測,并將探測結(jié)果及時(shí)傳遞給處于安全地區(qū)的控制系統(tǒng),便于救災(zāi)人員及時(shí)采取相應(yīng)的措施。
高層建筑攀爬型救援消防機(jī)器人技術(shù)初探
格式:pdf
大小:352KB
頁數(shù):3P
4.7
從高層建筑消防的實(shí)際需要出發(fā),簡要分析了傳統(tǒng)消防設(shè)備的不足和國內(nèi)外消防機(jī)器人的發(fā)展現(xiàn)狀,詳細(xì)介紹了高層建筑消防機(jī)器人的系統(tǒng)結(jié)構(gòu)和功能。
消防機(jī)器人技術(shù)在滅火救援中的設(shè)計(jì)分析 消防機(jī)器人技術(shù)在滅火救援中的設(shè)計(jì)分析
格式:pdf
大小:5.8MB
頁數(shù):2P
4.6
推動國民經(jīng)濟(jì)發(fā)展,城市化進(jìn)程與工業(yè)化發(fā)展占據(jù)了主導(dǎo)地位,更是綜合國力的體現(xiàn)。科學(xué)技術(shù)的不斷創(chuàng)新,為城市發(fā)展和工業(yè)化進(jìn)程提供了平臺,與此同時(shí),工業(yè)生產(chǎn)、城市建設(shè)中出現(xiàn)的安全隱患也日益增多,各類危險(xiǎn)場所的火災(zāi)以及由火災(zāi)引發(fā)的爆炸傷人事故給人們的生產(chǎn)、生活造成了極大的威脅。突發(fā)事故的不可預(yù)測和難以控制性,給消防救援工作帶來了極大的困難,已成為現(xiàn)代火災(zāi)撲救的難點(diǎn)之一。消防救援也面臨著救援方式和救援技術(shù)上的新變革,救援工作有時(shí)會面臨高溫、黑暗、有毒和濃煙等環(huán)境,單純依靠消防員不僅很難完成滅火救援任務(wù),還會危機(jī)自身安全。為了更好地解決這一難題,消防機(jī)器人應(yīng)運(yùn)而生,科技的不斷研發(fā)也使得消防機(jī)器人的作用日益增強(qiáng),在救援工作中的成效也越來越重要。
防爆排雷機(jī)器人的研究與設(shè)計(jì) 防爆排雷機(jī)器人的研究與設(shè)計(jì)
格式:pdf
大小:443KB
頁數(shù):未知
4.7
隨著電子技術(shù)的飛速發(fā)展和嵌入式單片機(jī)應(yīng)用的日新月異,機(jī)器人已被廣泛應(yīng)用于工業(yè)和農(nóng)業(yè)生產(chǎn)、國防、航天、科研、社會服務(wù)等各個(gè)方面。在自動控制的嵌入式單片機(jī)應(yīng)用系統(tǒng)中,往往將單片機(jī)作為一個(gè)核心部件,結(jié)合具體的硬件結(jié)構(gòu),讓單片機(jī)充分發(fā)揮其作用。本防爆排雷機(jī)器人電子設(shè)計(jì)與制作主要是基于32位嵌入式單片機(jī)stm32f103c8t6為核心芯片,以嵌入式單片機(jī)最小系統(tǒng)為基礎(chǔ),外加bmx-02藍(lán)牙串口通信模塊,電機(jī)驅(qū)動電路l298芯片,穩(wěn)壓電源lm2596和mic5205bm5電路,led發(fā)光二極管,前進(jìn)后退電機(jī),機(jī)械手臂電機(jī),開關(guān)電路等。使用altium_designer9進(jìn)行電路原理圖和pcb雙面板圖的設(shè)計(jì),利用雕刻機(jī)制作出pcb電路板,然后進(jìn)行電子板元件的焊接安裝,利用keiluvision4軟件編程和仿真和調(diào)試。使用手機(jī)藍(lán)牙通信進(jìn)行遙控,實(shí)現(xiàn)防爆排雷機(jī)器人(小車)的前進(jìn)、后退、轉(zhuǎn)彎、抓取拆卸物件等排雷功能。該防爆排雷機(jī)器人活動精度高、活動線路靈活,精致小巧,布局美觀,成本低廉,實(shí)用性強(qiáng),能夠按照要求實(shí)現(xiàn)無人接觸拆裝危險(xiǎn)物體。
委托書機(jī)器人消防車最新文檔
供氣消防車
格式:pdf
大小:960KB
頁數(shù):8P
4.4
供氣消防車應(yīng)用技術(shù) 一、滅火救援戰(zhàn)斗中供氣的重要性 供氣的用途:在滅火等救援中為消防戰(zhàn)士提供呼吸用空氣。 供氣機(jī)理:高壓空氣壓縮機(jī)將空氣壓縮、降溫、過濾成合格的壓縮空氣填充到碳纖維瓶的過 程。 在滅火救援戰(zhàn)斗中,為了有效實(shí)施滅火和救援,消防員常常需要深入充滿煙霧、毒氣的現(xiàn)場。 為了保證消防員自身的安全,消防員必須配戴各種防護(hù)裝備。 空氣呼吸器是各類防護(hù)裝備中應(yīng)用最為廣泛的防護(hù)裝備。 在滅火救援戰(zhàn)斗中消防員體力消耗大,空氣消耗量大,為了保證安全,還需要留有“撤退” 時(shí)的空氣余量。 1只6.8升空氣呼吸器理論使用時(shí)間為45分鐘,而實(shí)際使用時(shí)間一般為30分鐘。 為了保障空氣的供應(yīng),供氣保障裝備先后出現(xiàn)了“充氣站”、充氣拖車、供氣消防車。 二、供氣消防車發(fā)展沿革 為了有效解決空氣保障問題,供氣保障裝備最初形式為固定式“充氣站”;為了實(shí)現(xiàn)在滅火救 援現(xiàn)場充氣,進(jìn)而出現(xiàn)
消防車文章
格式:pdf
大小:350KB
頁數(shù):9P
4.3
消防車文章 沈陽將購世界最高101米的消防車 2011-02-09作者:姚琦東來源:華商晨報(bào)文字大小:【大】【中】【小】 關(guān)鍵字:消防車沈陽 在我國相關(guān)技術(shù)標(biāo)準(zhǔn)中,建筑高度超過24米且為二層及二層以上的公共建筑和超過10 層或10層以上的住宅被定義為高層建筑,建筑高度超過100米以上的為超高層建筑。 來自遼寧省消防總隊(duì)的最新統(tǒng)計(jì),按上述標(biāo)準(zhǔn),目前遼寧省共有高層建筑8764座、超 高層97座,另外正在建設(shè)之中的高層及超高層建筑則分別為3507座和37座。 其中,沈陽市最多,現(xiàn)有及在建高層建筑為別為3133座和1013座,超高層建筑現(xiàn)有 74座、在建24座。大連第二,現(xiàn)有和在建高層建筑分別為2805座和526座,現(xiàn)有和在建 超高層建筑21座和8座。 沈陽市人大代表、沈陽市消防局局長李國孝曾表示,沈陽雖然已經(jīng)有了一輛72米高的
機(jī)器人舵機(jī)控制器設(shè)計(jì) 機(jī)器人舵機(jī)控制器設(shè)計(jì)
格式:pdf
大小:174KB
頁數(shù):未知
4.7
舵機(jī)是一種位置伺服的驅(qū)動器,適用于那些需要角度不斷變化并可以保持的控制系統(tǒng)。伺服電機(jī)是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。在本設(shè)計(jì)中,我們采用單片機(jī)來驅(qū)動舵機(jī)工作,單片機(jī)通過改變輸出的pwm信號占空比來控制舵機(jī)的轉(zhuǎn)角與轉(zhuǎn)速;舵機(jī)能夠?qū)崿F(xiàn)正轉(zhuǎn)、反轉(zhuǎn)、自動旋轉(zhuǎn)等功能;為了更直觀地顯示轉(zhuǎn)角,我們采用了四位八段數(shù)據(jù)管用于實(shí)時(shí)顯示。

F1403.機(jī)器人潤滑脂,機(jī)器人專用潤滑脂,機(jī)器手專用潤滑脂
格式:doc
大小:30KB
頁數(shù):1P
3.9
埃科潤滑脂eccogreaselg1600是由脲類化合物稠化合成油,并加有極壓抗磨、抗氧、防漏、防銹等多種添加劑精制而成的工業(yè)機(jī)器人專用潤滑脂。
F1403.機(jī)器人潤滑脂,機(jī)器人專用潤滑脂,機(jī)器手專用潤滑脂
格式:doc
大小:31KB
頁數(shù):1P
3.9
埃科潤滑脂eccogreaselg1600是由脲類化合物稠化合成油,并加有極壓抗磨、抗氧、防漏、防銹等多種添加劑精制而成的工業(yè)機(jī)器人專用潤滑脂。
用于機(jī)器人螺釘柔性裝配的夾持器 用于機(jī)器人螺釘柔性裝配的夾持器
格式:pdf
大小:547KB
頁數(shù):未知
4.5
從機(jī)器人螺釘柔性裝配位姿調(diào)整策略的需要出發(fā),簡要介紹了機(jī)器人末端適從方式,提出了基于剛度矩陣的適從表達(dá)方案,設(shè)計(jì)并制作出具有良好適從特性的螺釘柔順夾持器,實(shí)驗(yàn)結(jié)果表明,該夾持器所具有的較寬位姿適從范圍為機(jī)器人螺釘柔性裝配的實(shí)施打下了良好基礎(chǔ)

履帶式機(jī)器人結(jié)構(gòu)設(shè)計(jì)
格式:pdf
大小:2.7MB
頁數(shù):57P
4.6
摘要 在微小型履帶機(jī)器人方面美國走在了世界的前列,代表機(jī)器人有 packbot機(jī)器人,talon機(jī)器人,nugv等。 我國微小型機(jī)器人的研究和開發(fā)晚于西方的一些發(fā)達(dá)國家,我國是從 20世紀(jì)80年代開始機(jī)器人領(lǐng)域的研究的。其中具有代表性的有中國科學(xué) 院研制的復(fù)合移動機(jī)器人“靈晰-b”型排爆機(jī)器人,“龍衛(wèi)士dragonguard x3b反恐機(jī)器人”,“jw-901排爆機(jī)器人”等。 此設(shè)計(jì)的目的設(shè)計(jì)結(jié)構(gòu)新穎,能實(shí)現(xiàn)過坑、越障等動作。通過在機(jī)器 人機(jī)架上加裝其他功能的模塊來實(shí)現(xiàn)不同的使用功能,本研究的意義是為 機(jī)器人提供一個(gè)動力輸出平臺,為開發(fā)各種功能的機(jī)器人提供基礎(chǔ)平臺。 此設(shè)計(jì)移動方案的選擇是采用了履帶式驅(qū)動結(jié)構(gòu)。結(jié)構(gòu)整體使用模塊 化設(shè)計(jì),以便后續(xù)拆卸維修,可以適應(yīng)于各種復(fù)雜的路面,并可主動控制 前后兩側(cè)搖臂的轉(zhuǎn)動來調(diào)節(jié)機(jī)器人的運(yùn)動姿態(tài),從而達(dá)到輔助過坑、
委托書機(jī)器人消防車相關(guān)
文輯推薦
知識推薦
百科推薦


職位:主任建筑師
擅長專業(yè):土建 安裝 裝飾 市政 園林


