WS1-10挖掘機(jī)全數(shù)字直流電控
WS1-10挖掘機(jī)全數(shù)字直流電控采用美國艾默生英國CT公司生產(chǎn)的MentorⅡ四象限全數(shù)字直流電機(jī)驅(qū)動(dòng)器和西門子或三菱公司的PLC可編程序控制器為核心組成的提升、推壓、回轉(zhuǎn)/行走供電調(diào)速系統(tǒng),用可控硅整流技術(shù)替代原來笨重和龐大的高壓異步電動(dòng)機(jī)拖動(dòng)三臺(tái)直流發(fā)電機(jī)組的調(diào)速系統(tǒng)。驅(qū)動(dòng)器內(nèi)部通過軟件進(jìn)行參數(shù)設(shè)置,實(shí)現(xiàn)雙閉環(huán)調(diào)速系統(tǒng),外部沒有反饋接線,從而大大簡(jiǎn)化了產(chǎn)品原理圖。
采用美國艾默生英國CT公司生產(chǎn)的MentorⅡ四象限全數(shù)字直流電機(jī)驅(qū)動(dòng)器和西門子或三菱公司的PLC可編程序控制器為核心組成的提升、推壓、回轉(zhuǎn)/行走供電調(diào)速系統(tǒng),用可控硅整流技術(shù)替代原來笨重和龐大的高壓異步電動(dòng)機(jī)拖動(dòng)三臺(tái)直流發(fā)電機(jī)組的調(diào)速系統(tǒng)。驅(qū)動(dòng)器內(nèi)部通過軟件進(jìn)行參數(shù)設(shè)置,實(shí)現(xiàn)雙閉環(huán)調(diào)速系統(tǒng),外部沒有反饋接線,從而大大簡(jiǎn)化了產(chǎn)品原理圖。
·新產(chǎn)品的創(chuàng)新點(diǎn)及主要特點(diǎn):
(1)對(duì)容量較大的10立方米電鏟采用全自動(dòng)無功補(bǔ)償裝置,有效的提高了功率因數(shù),經(jīng)現(xiàn)場(chǎng)測(cè)試功率因數(shù)可達(dá)0.85以上。同時(shí)抑制了多次諧波的影響。
(2)科技含量高,響應(yīng)速度快,系統(tǒng)特性硬,生產(chǎn)效率高。提高作業(yè)率增加產(chǎn)量。
(3)節(jié)約電能、減少維修費(fèi)用。
(4)機(jī)棚內(nèi)噪音大大降低,極大地改善了電鏟司機(jī)的工作環(huán)境。
WS1-10挖掘機(jī)全數(shù)字直流電控造價(jià)信息
WS1-10挖掘機(jī)全數(shù)字直流電控常見問題
-
最穩(wěn)定可靠的方法是使用集成穩(wěn)壓IC?,可用型號(hào)為78l03,其輸出電流能力為1安以上,實(shí)際上大部分電子產(chǎn)品都是采用此方案,制作成本在二元以下,至于用變壓器的方案根本不實(shí)用,電阻分壓更加行不通,因?yàn)樗鼛?..
-
要看你的電機(jī)轉(zhuǎn)速的
-
用直流電機(jī)來發(fā)電,得到的是直流電,還是交流電?
親測(cè),是直流電,(極性與電機(jī)的轉(zhuǎn)向有關(guān),示波器顯示,輸出波形與交流電全波整流后的波形類似,但是僅限有刷電機(jī),無刷的我就不知道了。可能有人會(huì)好奇這是為什么,這是因?yàn)橛须娝⒌拇嬖冢鼘?nèi)部的產(chǎn)生的交流電整...
WS1-10挖掘機(jī)全數(shù)字直流電控文獻(xiàn)

 挖掘機(jī)電控成套設(shè)備WS1B-8型
挖掘機(jī)電控成套設(shè)備WS1B-8型
格式:pdf
大小:21KB
頁數(shù): 1頁
評(píng)分: 4.4
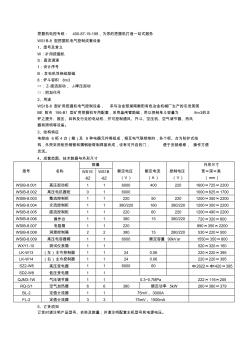
挖掘機(jī)電控專線: 400-87-19-199,為您的挖掘機(jī)打造一站式服務(wù) WS1B-8 型挖掘機(jī)電氣控制成套設(shè)備 1、型號(hào)及含義 W:礦用挖掘機(jī) S:直流調(diào)速 1:設(shè)計(jì)序號(hào) B:發(fā)電機(jī)雙繞組勵(lì)磁 8:鏟斗容積 8m3 □: Z-直流起動(dòng), J-降壓起動(dòng) □:附加代號(hào) 2、用途 WS1B-8 型礦用挖掘機(jī)電氣控制設(shè)備, 系與冶金部湖南衡陽有色冶金機(jī)械廠生產(chǎn)的引進(jìn)美國 BE 股市 195-B1 型礦用挖掘機(jī)專用配套,采用晶閘管勵(lì)磁,用以控制單斗容量為 8m3的正 鏟之提升、推壓、回轉(zhuǎn)及行走的電動(dòng)機(jī),并可控制通風(fēng)、開斗、空壓機(jī)、空氣調(diào)節(jié)器、熱風(fēng) 器和照明等設(shè)備。 3、結(jié)構(gòu)特征 電控由 6 柜 4 臺(tái)(箱)及 8 種電器元件等組成,相互電氣聯(lián)鎖制約,各個(gè)柜、臺(tái)為防護(hù)式結(jié) 構(gòu),外殼采用矩形鋼管和薄鋼板彎制焊接而成,設(shè)有可開啟的門, 便于安裝維修, 操作方便 靈活。 4、成套范圍、技術(shù)數(shù)據(jù)與外形尺寸

WS1-4(10)ab 全數(shù)字支流調(diào)速控制設(shè)備 系專與露天礦山,水利工程廣為應(yīng)用的電鏟的配套控制設(shè)備,可以控制單斗容量為4M或10M的正鏟提升、推壓、回轉(zhuǎn)及行走等電動(dòng)機(jī),并可控制通風(fēng)、開斗電動(dòng)機(jī)、空壓機(jī)、空氣調(diào)節(jié)器、自動(dòng)潤(rùn)滑裝置和照明設(shè)備。
F-D串機(jī)組方式
F-D串機(jī)組方式即交流原動(dòng)機(jī)(主電機(jī))-直流發(fā)電機(jī)組勵(lì)磁控制方式,系統(tǒng)技術(shù)裝備水平為五十到六十年代水平,其特點(diǎn)是:
a. 采用傳統(tǒng)的點(diǎn)對(duì)點(diǎn)的硬件接線方式,控制方式復(fù)雜,系統(tǒng)中間繼電器和
接觸器、自動(dòng)開關(guān)多、故障點(diǎn)多,可靠性差。
b. 由于挖土機(jī)特有的運(yùn)行特性,系統(tǒng)常處于過流運(yùn)行狀態(tài),磁場(chǎng)調(diào)節(jié)難以
控制,因此,故障率高。
c. 由于存在能量轉(zhuǎn)換的中間過程(電-機(jī)-電轉(zhuǎn)換)和空載待機(jī)過程,電能
損耗大。系統(tǒng)時(shí)間常數(shù)大,影響靈敏度。
d. 維護(hù)方式復(fù)雜(更換發(fā)電機(jī),需要多工種及起重、運(yùn)輸工具的協(xié)作),
排查處理故障困難,維護(hù)費(fèi)用過高。
e. 操作環(huán)境惡劣,車內(nèi)震動(dòng)和噪音大,溫度高。
全數(shù)字化電氣控制系統(tǒng)控制方式
全數(shù)字化電氣控制系統(tǒng)控制方式,系統(tǒng)技術(shù)裝備水平為九十年代中、后期
水平,其特點(diǎn)是:
a. 取消串機(jī)組和原直流控制屏,用全數(shù)字化直流驅(qū)動(dòng)裝置直接控制直流電
機(jī),系統(tǒng)不存在能量轉(zhuǎn)換中間過程,節(jié)能效果明顯(20%)。
b. 整個(gè)控制過程由可編程控制器(PLC)或現(xiàn)場(chǎng)總線系統(tǒng)通過控制與算法軟
件替代硬件的方式來實(shí)現(xiàn),以減少硬件接線和故障點(diǎn),并提高抗擾動(dòng)性,控制
信號(hào)由32位微處理器處理,通過面板快速訪問參數(shù),具有控制、監(jiān)測(cè)、保護(hù)和
通訊功能。
c. 系統(tǒng)特性硬、出力大,使生產(chǎn)效率大大提高。
d. 系統(tǒng)具備完善的保護(hù)功能、故障診斷功能,能可靠有效的保護(hù)電動(dòng)機(jī),
當(dāng)系統(tǒng)出現(xiàn)故障時(shí)可根據(jù)故障提示功能迅速排除,保證生產(chǎn)的連續(xù)性,維護(hù)方
式簡(jiǎn)單。
e. 由于沒有機(jī)組的噪音、震動(dòng)和運(yùn)用了操作軟件,大大的改善了操作環(huán)境
。
f. 電鏟的操作習(xí)慣、操作工藝和機(jī)械部分工藝不變,司機(jī)室各主令開關(guān)點(diǎn)
以無源點(diǎn)直接進(jìn)PLC或現(xiàn)場(chǎng)總線遠(yuǎn)程I/O站點(diǎn)。
g. 個(gè)斗容挖掘機(jī)上各種容量的全數(shù)字化驅(qū)動(dòng)器的結(jié)構(gòu)由主板、功放板和功
率元件組成,主板與功放板各種容量全部通用,功率元件根據(jù)容量選用不同。
用戶生產(chǎn)備件率很低。
h. 由于采用可控硅整流電路,其功率因數(shù)和諧波分量會(huì)對(duì)電網(wǎng)產(chǎn)生一定程
度的影響,當(dāng)整流負(fù)載達(dá)到一定程度時(shí),需要采取措施消除諧波分量的影響和
補(bǔ)償功率因素。
第1章卡特挖掘機(jī)液電控制系統(tǒng)的發(fā)展
11卡特挖掘機(jī)概述
12卡特系列挖掘機(jī)特點(diǎn)
121D系列挖掘機(jī)的特點(diǎn)
122卡特320C型挖掘機(jī)的特點(diǎn)
13液電控制系統(tǒng)的使用維護(hù)
131液壓控制系統(tǒng)的維護(hù)
132電控系統(tǒng)的維護(hù)
14挖掘機(jī)液壓系統(tǒng)的維護(hù)保養(yǎng)
第2章卡特挖掘機(jī)電腦控制系統(tǒng)
21電腦控制概述
22卡特液電控制系統(tǒng)
221發(fā)動(dòng)機(jī)轉(zhuǎn)速控制
222自我診斷功能
223單觸點(diǎn)低怠速
224發(fā)動(dòng)機(jī)轉(zhuǎn)速保護(hù)
225液壓泵調(diào)節(jié)控制
226冷卻風(fēng)扇控制
227行走速度控制
228回轉(zhuǎn)制動(dòng)操作
229重物提升控制模式(選用)
2210備用系統(tǒng)
2211監(jiān)控器
23液電故障的含義
24液電控制組件
第3章卡特液壓泵液電控制系統(tǒng)
31液壓泵的結(jié)構(gòu)原理
311液壓泵構(gòu)造
312液壓泵控制系統(tǒng)
32液壓泵的液電控制系統(tǒng)
321液壓泵流量和壓力控制系統(tǒng)
322電子控制系統(tǒng)
323先導(dǎo)液壓系統(tǒng)
324先導(dǎo)系統(tǒng)液壓裝置
33液壓泵的性能測(cè)試
331液壓泵的測(cè)試(恒功率流量控制)
332泵控制系統(tǒng)(輸出流量)的測(cè)試
333液壓泵最大輸出流量的調(diào)整
334泵控制系統(tǒng)(反向流量)的測(cè)試
34液壓泵常見故障診斷與排除
35液壓泵維修的調(diào)整
351液壓泵的排除氣體
352壓力技術(shù)規(guī)格
353主安全閥的臨時(shí)調(diào)定
354安全閥(先導(dǎo))的測(cè)試與調(diào)整
355安全閥(主)的測(cè)試與調(diào)整
第4章控制閥的液電控制系統(tǒng)
41主控制閥液電控制
411主控制閥簡(jiǎn)述
412液壓缸液電系統(tǒng)
413主控制閥的拆卸與組裝
414主控制閥液電控制故障診斷與排除
42先導(dǎo)控制的結(jié)構(gòu)與維修
421手控先導(dǎo)閥
422行走先導(dǎo)閥的拆解
423行走先導(dǎo)閥的組裝
424先導(dǎo)閥的故障診斷與排除
第5章卡特回轉(zhuǎn)、行走馬達(dá)液電控制系統(tǒng)
51液壓馬達(dá)概述
52回轉(zhuǎn)裝置液電控制
521回轉(zhuǎn)馬達(dá)液電控制的結(jié)構(gòu)原理
522回轉(zhuǎn)馬達(dá)液電控制系統(tǒng)
523回轉(zhuǎn)裝置的拆卸與組裝
53行走裝置的液電控制系統(tǒng)
531終傳動(dòng)的構(gòu)造與原理
532行走系統(tǒng)的液電控制
533行走裝置的拆卸與組裝
534液壓馬達(dá)的維修
54液壓缸液電控制系統(tǒng)
541液壓缸結(jié)構(gòu)
542液壓缸故障診斷與排除
第6章液壓輔助元件
61液壓油箱與熱交換器
611液壓油箱
612熱交換器
62過濾器
63蓄能器
64油管與管接頭
65中心回轉(zhuǎn)接頭
66密封裝置
第7章卡特挖掘機(jī)液電控制系統(tǒng)故障診斷與排除
71故障診斷與排除的初步程序
72液電控制系統(tǒng)的故障診斷
73故障維修模式的診斷程序
74卡特320C型挖掘機(jī)電腦控制系統(tǒng)
75故障診斷與排除
76挖掘機(jī)工作裝置性能的測(cè)試與調(diào)整
761測(cè)試前的準(zhǔn)備
762斗桿油缸的調(diào)整
763鏟斗油缸的調(diào)整
764動(dòng)臂油缸的調(diào)整
765回轉(zhuǎn)安全閥的測(cè)試與調(diào)整
766行走裝置的測(cè)試與調(diào)整
歡迎訂閱工程機(jī)械類圖書 2100433B
WS1-10挖掘機(jī)全數(shù)字直流電控相關(guān)推薦
- 相關(guān)百科
- 相關(guān)知識(shí)
- 相關(guān)專欄
- 小型臺(tái)式自動(dòng)鎖螺絲機(jī)
- 十字槽盤頭自鉆自攻螺釘
- 方頭長(zhǎng)圓柱端緊定螺釘
- 兒女墻
- 馬桶蓋板膨脹螺絲
- 十字槽凹穴六角頭自攻螺釘和大墊圈組合件
- 沉頭雙榫螺栓
- 球磨機(jī)螺栓
- 304HC不銹鋼螺絲線材
- 三角形螺絲刀
- 吊環(huán)螺釘
- 大悲院
- 波珠螺絲
- 鋼結(jié)構(gòu)高強(qiáng)度螺栓連接技術(shù)規(guī)程
- 開槽圓柱頭軸位螺釘
- t型槽用螺栓
- 在全縣非煤礦山和危化企業(yè)安全生產(chǎn)工作會(huì)議上的講話
- 以MSP430FW427為核心的遠(yuǎn)程數(shù)字水表設(shè)計(jì)
- 云南省昆明市建設(shè)局建筑工程深基坑施工安全管理規(guī)定
- 招遠(yuǎn)電視臺(tái)制作播出系統(tǒng)數(shù)字化改造工程的設(shè)計(jì)與實(shí)踐
- 全熱回收地源熱泵空調(diào)機(jī)組的系統(tǒng)及工程方案設(shè)計(jì)
- 云南省城鎮(zhèn)照明工程安全生產(chǎn)規(guī)程(修訂征求意見稿)
- 岳陽信息價(jià),最新最全岳陽工程造價(jià)信息網(wǎng)信息價(jià)下載
- 云浮建筑施工領(lǐng)域安全管理聯(lián)合執(zhí)法檢查專項(xiàng)行動(dòng)方案
- 新型自行式全旋轉(zhuǎn)橋梁檢修車在橋梁工程中的應(yīng)用
- 月份安全工作總結(jié)(20200812144457)
- 有關(guān)建設(shè)工程施工安全涉及常用法律法規(guī)標(biāo)準(zhǔn)規(guī)范清單
- 智能材料系統(tǒng)與結(jié)構(gòu)工程構(gòu)造安全監(jiān)控
- 中國式駕駛室安全標(biāo)準(zhǔn)出臺(tái) 或?qū)?dǎo)致卡車行業(yè)洗牌
- 云南某水電站水庫一期蓄水安全鑒定工程施工自檢報(bào)告
- 幼兒園教室坍塌事件中談施工相鄰影響及房屋安全檢測(cè)
- 張能2號(hào)附件安全標(biāo)準(zhǔn)化管理考評(píng)評(píng)分細(xì)則-礦井-3
最新詞條
安徽省政采項(xiàng)目管理咨詢有限公司
數(shù)字景楓科技發(fā)展(南京)有限公司
懷化市人民政府電子政務(wù)管理辦公室
河北省高速公路京德臨時(shí)籌建處
中石化華東石油工程有限公司工程技術(shù)分公司
手持無線POS機(jī)
廣東合正采購招標(biāo)有限公司
上海城建信息科技有限公司
甘肅鑫禾國際招標(biāo)有限公司
燒結(jié)金屬材料
齒輪計(jì)量泵
廣州采陽招標(biāo)代理有限公司河源分公司
高鋁碳化硅磚
博洛尼智能科技(青島)有限公司
燒結(jié)剛玉磚
深圳市東海國際招標(biāo)有限公司
搭建香蕉育苗大棚
SF計(jì)量單位
福建省中億通招標(biāo)咨詢有限公司
泛海三江
威海鼠尾草
Excel 數(shù)據(jù)處理與分析應(yīng)用大全
廣東國咨招標(biāo)有限公司
拆邊機(jī)
甘肅中泰博瑞工程項(xiàng)目管理咨詢有限公司
山東創(chuàng)盈項(xiàng)目管理有限公司
當(dāng)代建筑大師
廣西北纜電纜有限公司
大山檳榔
上海地鐵維護(hù)保障有限公司通號(hào)分公司
舌花雛菊
甘肅中維國際招標(biāo)有限公司
華潤(rùn)燃?xì)猓ㄉ虾#┯邢薰?
湖北鑫宇陽光工程咨詢有限公司
GB8163標(biāo)準(zhǔn)無縫鋼管
中國石油煉化工程建設(shè)項(xiàng)目部
韶關(guān)市優(yōu)采招標(biāo)代理有限公司
莎草目
電梯平層準(zhǔn)確度
建設(shè)部關(guān)于開展城市規(guī)劃動(dòng)態(tài)監(jiān)測(cè)工作的通知
廣州利好來電氣有限公司
四川中澤盛世招標(biāo)代理有限公司