伸縮機(jī)構(gòu)
伸縮機(jī)構(gòu)是起重機(jī)械的一種重要結(jié)構(gòu)。
伸縮機(jī)構(gòu)基本信息
| 中文名稱(chēng) | 伸縮機(jī)構(gòu) | 本質(zhì) | 一種重要結(jié)構(gòu) |
|---|---|---|---|
| 所屬 | 起重機(jī)械 | 伸縮方式 | 順序伸縮、同步伸縮和獨(dú)立伸縮 |

臂架伸縮機(jī)構(gòu)
伸縮方式
具有三節(jié)或三節(jié)以上的吊臂,各節(jié)臂的伸縮,基本有三種方式:順序伸縮、同步伸縮和獨(dú)立伸縮。
驅(qū)動(dòng)方式
臂架伸縮機(jī)構(gòu)的驅(qū)動(dòng)型式有機(jī)械式、液壓式和復(fù)合式三種。
(1)機(jī)械式
機(jī)械式驅(qū)動(dòng)裝置構(gòu)造簡(jiǎn)單,一般只能在吊鉤空負(fù)荷時(shí)使臂架伸縮,而且只用于有一節(jié)伸縮臂的小噸位起重機(jī)上。有鋼繩卷筒驅(qū)動(dòng)、齒輪齒條驅(qū)動(dòng),或者利用其它工作機(jī)構(gòu)驅(qū)動(dòng)。
(2)液壓式
液壓驅(qū)動(dòng)是吊臂伸縮機(jī)構(gòu)的主要驅(qū)動(dòng)型式。設(shè)計(jì)相應(yīng)的伸縮液壓缸和油路,可以實(shí)現(xiàn)臂架的各種伸縮方式。
伸縮機(jī)構(gòu)造價(jià)信息
伸縮機(jī)構(gòu)支腿收放機(jī)構(gòu)
汽車(chē)、輪胎和鐵輪起重機(jī)都裝有可收放支腿。支腿的作用是增大起重機(jī)的支撐基底,提高起重能力。起重機(jī)一般裝有四個(gè)支腿,前后左右兩側(cè)分置。為了補(bǔ)償作業(yè)場(chǎng)地地面的傾斜和不平,增大起重機(jī)的抗傾覆穩(wěn)定性,支腿應(yīng)能單獨(dú)調(diào)節(jié)高度。常見(jiàn)支腿的類(lèi)型有一下幾種。
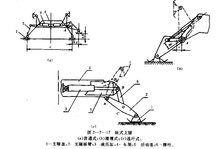
蛙式支腿
如下圖所示,蛙式支腿結(jié)構(gòu)簡(jiǎn)單,液壓缸數(shù)量少(一推一缸),重量輕。但每個(gè)支腿在高度上單獨(dú)調(diào)節(jié)困難,不易保證車(chē)架水平,而且支腿搖臂尺寸有限,因而支腿跨距就不能很大,宜在小噸位起重機(jī)使用。
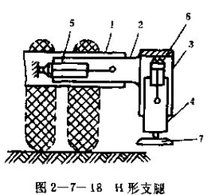
H形支腿
每個(gè)支腿有兩個(gè)液壓缸,水平外伸液壓缸和垂直支撐液壓缸。為了保證足夠的外伸距離,左右支腿的固定梁前后錯(cuò)開(kāi)。H形支腿外伸距離大,每個(gè)支腿可以單獨(dú)調(diào)節(jié),對(duì)作業(yè)場(chǎng)地和地面的適應(yīng)性好,廣泛用于中、大型起重機(jī)上。缺點(diǎn)是重量大,支腿高度大,影響作業(yè)空間。
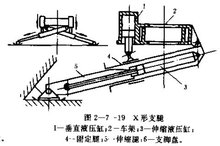
X形支腿
輻射式支腿
輻射式支腿用于大型輪胎式起重機(jī)。支腿結(jié)構(gòu)直接裝在回轉(zhuǎn)支撐裝置的底架上,起重機(jī)上車(chē)所受的全部載荷直接經(jīng)過(guò)回轉(zhuǎn)支撐傳遞到支腿上,而不像普通起重機(jī)那樣要先經(jīng)過(guò)車(chē)架大梁再傳遞給支腿。這種結(jié)構(gòu)可以避免由于支腿反力過(guò)大,要求車(chē)架加大斷面,增加自重,整個(gè)底盤(pán)可以減輕重量5%-10%。
鉸接式支腿
如下圖所示,活動(dòng)支腿與車(chē)架鉸接,由人力或水平液壓缸實(shí)現(xiàn)支腿的水平擺動(dòng)(收攏或放開(kāi)),收腿時(shí)活動(dòng)支腿緊靠車(chē)架大梁兩側(cè),放開(kāi)式根據(jù)需要支腿與車(chē)架形成不同發(fā)的夾角,從而改變跨度,以適應(yīng)不同場(chǎng)地和不同發(fā)熱作業(yè)性能要求。常用于大、中噸位的鐵路起重機(jī)上。
起重機(jī)的伸縮機(jī)構(gòu)包括臂架伸縮機(jī)構(gòu)和支腿收放機(jī)構(gòu)。臂架伸縮機(jī)構(gòu)的作用是改變臂架長(zhǎng)度,以獲得需要的幅度和起升高度,滿(mǎn)足作業(yè)要求。支腿收放機(jī)構(gòu)的用途是增大起重機(jī)的基底面積,調(diào)整場(chǎng)地的坡度,提高抗傾覆穩(wěn)定性,增大起重能力。
伸縮機(jī)構(gòu)常見(jiàn)問(wèn)題
-
神奇的機(jī)械原理,這個(gè)伸縮機(jī)構(gòu)怎么樣,是不是看
給出圖紙看看。
-
手臂回轉(zhuǎn)升降機(jī)構(gòu),手臂伸縮機(jī)構(gòu),伸縮位置檢測(cè)器,升降位置檢測(cè)器的工作原理急需謝謝
你所說(shuō)的是工業(yè)機(jī)器人,其結(jié)構(gòu)有很多種方式,大多數(shù)為連桿機(jī)構(gòu),其伸縮位置和升降位置的檢測(cè)是由控制系統(tǒng)內(nèi)部來(lái)檢測(cè)的,因?yàn)闄C(jī)械手的驅(qū)動(dòng)裝置都采用伺服電機(jī),所以可以隨時(shí)檢測(cè)當(dāng)前位置,除了位置檢測(cè)外,機(jī)械手一般...
-
伸縮式皮帶輸送機(jī)分為固定部分和非固定部分兩大部分,固定部分由機(jī)頭傳動(dòng)裝置、儲(chǔ)帶裝置、收放膠帶裝置等組成;非固定部分由無(wú)螺栓連接的快速可拆支架、機(jī)尾等組成。 (1)機(jī)頭傳動(dòng)裝置:由傳動(dòng)滾筒、減速...
伸縮機(jī)構(gòu)文獻(xiàn)

 伸縮機(jī)構(gòu)的研究與設(shè)計(jì)
伸縮機(jī)構(gòu)的研究與設(shè)計(jì)
格式:pdf
大小:479KB
頁(yè)數(shù): 未知
評(píng)分: 4.4
總結(jié)了現(xiàn)有幾種伸縮機(jī)構(gòu)的原理、應(yīng)用場(chǎng)合以及各自的特點(diǎn),提出了一種新型伸縮機(jī)構(gòu)的設(shè)計(jì)方法,給出了該新型自動(dòng)伸縮機(jī)構(gòu)的結(jié)構(gòu)原理圖,并指明了伸縮機(jī)構(gòu)在未來(lái)將有廣闊的應(yīng)用前景。當(dāng)前需系統(tǒng)地開(kāi)展研究。
輪式起重機(jī)箱型臂伸縮機(jī)構(gòu)
格式:pdf
大小:479KB
頁(yè)數(shù): 8頁(yè)
評(píng)分: 4.3
起重臂伸縮機(jī)構(gòu)結(jié)構(gòu)形式,直接影響到起重臂結(jié)構(gòu)形式,進(jìn)而影響到整機(jī)性能。介紹目前應(yīng)用廣泛的無(wú)銷(xiāo)式伸縮機(jī)構(gòu)和單缸插銷(xiāo)式伸縮機(jī)構(gòu)的結(jié)構(gòu)形式及其應(yīng)用情況。對(duì)于起重臂為五節(jié)以下的產(chǎn)品,通常采用在伸縮臂內(nèi)布置1根液壓缸加1套鋼絲繩組滑輪系統(tǒng)、1根液壓缸加2套鋼絲繩組滑輪系統(tǒng)、2根液壓缸加1套鋼絲繩組滑輪系統(tǒng)、2根液壓缸加2套鋼絲繩組滑輪系統(tǒng),組成同步伸縮或者順序與同步組合伸縮的形式。對(duì)于起重臂為六節(jié)以上的產(chǎn)品,則采用單缸插銷(xiāo)式伸縮機(jī)構(gòu)。單缸插銷(xiāo)式伸縮系統(tǒng),在160t、六節(jié)或六節(jié)臂以上的輪式起重機(jī)中應(yīng)用,占有一定的優(yōu)勢(shì),但對(duì)制造企業(yè)和使用者,都提出了更高的要求。
《機(jī)械工程名詞 第五分冊(cè)》第一版。
大伸縮比/高展開(kāi)度伸縮機(jī)構(gòu)的創(chuàng)新設(shè)計(jì)是國(guó)際機(jī)構(gòu)學(xué)研究的前沿課題,具有廣泛的工程應(yīng)用前景。本項(xiàng)目面向航空子午線(xiàn)輪胎成型裝備自主創(chuàng)新需求,以拓?fù)?變胞機(jī)構(gòu)學(xué)為主要工具,研究一類(lèi)結(jié)構(gòu)緊湊、大伸縮比、高剛度伸縮機(jī)構(gòu)的設(shè)計(jì)理論與方法。擬從組成機(jī)構(gòu)的基本伸縮單元的構(gòu)型優(yōu)選及組合方式出發(fā),通過(guò)揭示基本伸縮單元的拓?fù)錁?gòu)型與整個(gè)機(jī)構(gòu)伸縮性能的映射關(guān)系,提出適于這類(lèi)機(jī)構(gòu)基本伸縮單元構(gòu)型優(yōu)選、性能評(píng)價(jià)及尺度綜合的理論與方法,形成整個(gè)機(jī)構(gòu)的數(shù)字化設(shè)計(jì)流程,并用于指導(dǎo)一種具有自主知識(shí)產(chǎn)權(quán)的航空子午線(xiàn)輪胎成型鼓原型樣機(jī)開(kāi)發(fā),進(jìn)而為我國(guó)航空子午線(xiàn)輪胎成型鼓的自主創(chuàng)新提供重要的理論和技術(shù)基礎(chǔ)。
使貨叉水平伸縮的機(jī)構(gòu)。
伸縮機(jī)構(gòu)相關(guān)推薦
- 相關(guān)百科
- 相關(guān)知識(shí)
- 相關(guān)專(zhuān)欄
- 中國(guó)機(jī)械行業(yè)標(biāo)準(zhǔn)匯編:金屬切削機(jī)床卷
- NSK23026CDE4軸承
- BOWERMA1214EL軸承
- 古建磚瓦砼保護(hù)涂料
- OTTJAKOB
- 壓氣機(jī)
- 磨工工夾器具應(yīng)用實(shí)例
- 油泵
- 立式半自動(dòng)車(chē)床
- 橫向穩(wěn)定桿
- 車(chē)工工藝與技能學(xué)生用書(shū)1:學(xué)習(xí)任務(wù)
- 花生田端大薊馬
- INAF-34512.AU軸承
- 螺旋打樁機(jī)
- 雙薄壁墩
- YRT150軸承
- 永磁操動(dòng)機(jī)構(gòu)應(yīng)用于126kV高壓真空斷路器
- 以電動(dòng)葫蘆為起升機(jī)構(gòu)的簡(jiǎn)易強(qiáng)制式升降機(jī)鋼絲繩檢驗(yàn)
- 政府采購(gòu)代理機(jī)構(gòu)管理暫行辦法財(cái)庫(kù)〔2018〕2號(hào)
- 中國(guó)建筑業(yè)協(xié)會(huì)召開(kāi)落實(shí)分支機(jī)構(gòu)管理辦法座談會(huì)
- 異型鋼伸縮縫在舊橋改造施工中安裝新工藝及技術(shù)要求
- 中國(guó)建筑業(yè)協(xié)會(huì)智能建筑分會(huì)第三屆領(lǐng)導(dǎo)機(jī)構(gòu)人員名單
- 關(guān)于開(kāi)展政府采購(gòu)招標(biāo)業(yè)務(wù)代理機(jī)構(gòu)登記備案工作通知
- 關(guān)于第九合同段伸縮縫C50鋼纖維混凝土配合比批復(fù)
- 關(guān)于成立創(chuàng)建安全文化建設(shè)示范企業(yè)工作組織機(jī)構(gòu)通知
- 廣東省工業(yè)主體科研機(jī)構(gòu)現(xiàn)代知識(shí)產(chǎn)權(quán)管理制度建設(shè)
- 關(guān)于氣液聯(lián)動(dòng)執(zhí)行機(jī)構(gòu)進(jìn)氣閥運(yùn)行狀態(tài)下是否關(guān)閉
- 關(guān)于進(jìn)一步加強(qiáng)施工圖設(shè)計(jì)文件審查機(jī)構(gòu)管理工作通知
- 關(guān)于某廠(chǎng)#2機(jī)組五段抽汽伸縮節(jié)斷裂分析解決及預(yù)防
- 工程咨詢(xún)機(jī)構(gòu)在新形勢(shì)下為項(xiàng)目融資提供咨詢(xún)服務(wù)
- 國(guó)家建筑材料工業(yè)局職能配置、內(nèi)設(shè)機(jī)構(gòu)和人員編制規(guī)定
- 江蘇省示范監(jiān)理項(xiàng)目(省優(yōu)秀項(xiàng)目監(jiān)理機(jī)構(gòu))考核標(biāo)準(zhǔn)
最新詞條
安徽省政采項(xiàng)目管理咨詢(xún)有限公司
數(shù)字景楓科技發(fā)展(南京)有限公司
懷化市人民政府電子政務(wù)管理辦公室
河北省高速公路京德臨時(shí)籌建處
中石化華東石油工程有限公司工程技術(shù)分公司
手持無(wú)線(xiàn)POS機(jī)
廣東合正采購(gòu)招標(biāo)有限公司
上海城建信息科技有限公司
甘肅鑫禾國(guó)際招標(biāo)有限公司
燒結(jié)金屬材料
齒輪計(jì)量泵
廣州采陽(yáng)招標(biāo)代理有限公司河源分公司
高鋁碳化硅磚
博洛尼智能科技(青島)有限公司
燒結(jié)剛玉磚
深圳市東海國(guó)際招標(biāo)有限公司
搭建香蕉育苗大棚
SF計(jì)量單位
福建省中億通招標(biāo)咨詢(xún)有限公司
泛海三江
威海鼠尾草
Excel 數(shù)據(jù)處理與分析應(yīng)用大全
廣東國(guó)咨招標(biāo)有限公司
拆邊機(jī)
甘肅中泰博瑞工程項(xiàng)目管理咨詢(xún)有限公司
山東創(chuàng)盈項(xiàng)目管理有限公司
當(dāng)代建筑大師
廣西北纜電纜有限公司
大山檳榔
上海地鐵維護(hù)保障有限公司通號(hào)分公司
舌花雛菊
甘肅中維國(guó)際招標(biāo)有限公司
華潤(rùn)燃?xì)猓ㄉ虾#┯邢薰?
湖北鑫宇陽(yáng)光工程咨詢(xún)有限公司
GB8163標(biāo)準(zhǔn)無(wú)縫鋼管
中國(guó)石油煉化工程建設(shè)項(xiàng)目部
韶關(guān)市優(yōu)采招標(biāo)代理有限公司
莎草目
電梯平層準(zhǔn)確度
建設(shè)部關(guān)于開(kāi)展城市規(guī)劃動(dòng)態(tài)監(jiān)測(cè)工作的通知
廣州利好來(lái)電氣有限公司
四川中澤盛世招標(biāo)代理有限公司