





格式:pdf
大小:181KB
頁數: 7頁
為解決橋式吊車水平移動過程中的定位控制與防擺控制問題, 利用拉格朗日方程建立了其非線性數學模型, 設計了自抗擾控制器(ADRC: Auto Disturb ances Rejection Controller)并與比例微分(PD: Proportional Differential)控制器.利用人工魚群算法對控制器參數進行了整體優化, 克服了試湊參數的繁瑣性.通過仿真實驗對控制器進行的測試結果表明, 該控制器系統能有效抑制負載擺動, 對系統參數變化及擺角擾動有很強的魯棒性.
格式:pdf
大小:1.2MB
頁數: 4頁
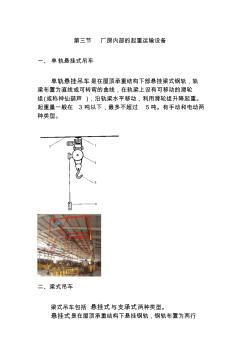
第三節 廠房內部的起重運輸設備 一、 單軌懸掛式吊車 單軌懸掛吊車是在屋頂承重結構下部懸掛梁式鋼軌,軌 梁布置為直線或可轉彎的曲線,在軌梁上設有可移動的滑輪 組(或稱神仙葫蘆 ),沿軌梁水平移動,利用滑輪組升降起重。 起重量一般在 3 噸以下,最多不超過 5噸。有手動和電動兩 種類型。 二、梁式吊車 梁式吊車包括 懸掛式與支承式兩種類型。 懸掛式是在屋頂承重結構下懸掛鋼軌,鋼軌布置為兩行 直線,在兩行軌梁上設有可滑行的單梁。 支承式是在排架拄上設牛腿,牛腿上設吊車梁,吊車梁 上安裝鋼軌,鋼軌上設有可滑行的單梁,在滑行的單梁上裝 有可滑行的滑輪組,在單梁與滑輪組行走范圍內均可起吊重 物。 梁式吊車起重量一般不超過 5 噸,有電動和手動兩種。 三、橋式吊車 橋式吊車通常是在廠房排架柱上設牛腿,牛腿上擱吊車 梁,吊車梁上安裝鋼軌, 鋼軌上放置能滑行的雙榀鋼橋架 (或 板梁 ),橋架上支承小車;
熱門知識
吊車凸輪控制器-
話題: 地產家居funboy2009
-
話題: 工程造價mikesunny301
精華知識
吊車凸輪控制器-
話題: 地產家居moqikailin
-
話題: 地產家居wanghuipeng
-
話題: 地產家居riverisland
最新知識
吊車凸輪控制器-
話題: 水利水電meizioralic
-
話題: 地產家居loulingyun
相關問答
吊車凸輪控制器-
話題: 工程造價xjtqfxiang
吊車凸輪控制器相關專題
- 六噸吊車多少錢
- 中聯25噸吊車價格表
- 中聯重科25噸吊車什么價
- 中聯重科25T汽車吊車價格表
- 中聯吊車12噸新款多少錢
- 中聯重科80噸吊車的價格
- 租8噸吊車多少錢包月
- 租吊車一般一天多少錢
- 租200t吊車每小時多少錢
- 租吊車一天多少錢
- 引黃工程北干1~#隧洞Ⅳ標預制廠房鋼吊車梁的設計
- 基于相關國家建筑標準設計圖集鋼吊車梁設計軟件研發
- 16T吊車吊裝施工方案
- 輕鋼廠房改造為中級制吊車梁工業廠房加固工程監控技術
- 利勃海爾500噸吊車性能表LTM1500中文簡表
- 400T履帶吊車性能表
- 500kV鋼管塔采用吊車及懸浮抱桿混合組立施工方法
- 單層鋼結構安裝分項工程鋼吊車梁等檢驗批質量驗收記錄
- 門式剛架輕型房屋鋼結構有懸掛吊車
- 鋼筋混凝土吊車梁工作級別
- 宜興抽水蓄能電站地下廠房巖壁吊車梁混凝土現場溫度控制
- 印尼ASAHANNO.1水電站廠房吊車梁施工設計方案
- 吊車架梁專項施工方案
- 常用吊車參數25T.50T.65T.75T.100T
- 大噸位吊車門式剛架鋼結構廠房板件寬厚比控制
- 04SG518-3門式剛架輕型房屋鋼結構(有吊車)
- 04SG518-2剛架輕型房屋鋼結構(有懸掛吊車)