滑模施工難題應對
下面是我們在施工中遇到的一些難題和采取的相應對策:
1.滑升平臺易變形平臺剛度和穩定性應加強
在滑升過程中,由于筒倉的直徑太大,平臺受自重、施工活載、混凝土摩阻力及各種附加荷載的影響也很大,因此容易出現變形。當平臺變形后,對滑模過程將造成很大的影響。會出現因平臺滑升高差太大,造成結構的垂直度超差,或扭轉偏差嚴重,甚至無法繼續滑升的現象。所以在平臺組裝時,我們采取了以下措施:
控制提升架及千斤頂的數量,且布置要均勻。千斤頂的間距在1.2m左右。對壁柱等特殊部位,增設提升千斤頂。在安裝提升架時,必須保證垂直度,且橫梁要水平。液壓油管長度及直徑要基本一致,油路暢通,以保證加壓時壓力傳送同時到位。
加密平臺的垂直支撐系統,增設適當的剪刀撐。對垂直支撐我們采用的是比一般滑升平臺,隔跨加密的辦法。同時,每隔3~4m左右設置一道剪刀撐。
加大柔性平臺的拉筋直徑,加密拉筋數量。根據筒倉直徑的大小,采用的拉桿鋼筋直徑為14~16mm,間距為1~1.2m左右。
2.盡量減輕平臺自重和施工荷載
在加強平臺剛度的同時,應盡可能地減少自重對平臺的影響。也就是說,在平臺組裝的過程中,不是越牢固越好。因為,自重過大時,必然增加起升系統的負荷。同時還要注意滑升過程中平臺上的材料堆放問題。在滑升過程中,要做到平臺上的材料堆放要均勻,而且在保證使用的情況下,盡可能做到堆量少,勤上料。要做到這一點,垂直運輸工具的配備一定要合理。我們采用了兩臺塔吊,負責吊裝鋼筋、提升桿等材料。
3.保證混凝土的澆灌強度及鋼筋綁扎的速度
因為滑模施工要求每一滑升高度的混凝土澆筑及鋼筋綁扎,必須在規定的單位時間內完成,否則,滑模工作就不能連續進行。當筒倉結構直徑大了之后,混凝土的澆灌量和鋼筋綁扎量都大得多,而混凝土的凝結時間是固定的。
滑模造價信息
滑模滑模操作平臺支承系統
操作平臺支承系統有兩大類,一類是剛性支承系統,其中又有由中心筒及輻射布置的桁架結構組成的"輪轂式"支承系統及由主副桁架、主副梁組成的緊貼內圈布置的多連形支承系統;另一類是柔性支承系統。
滑模爬升千斤頂選用
爬升千斤頂由過去單一的3.5t級滾珠式一種,發展為3.5t、6t、9t、10t級,且有滾珠式、楔塊式、松卡式和升降式等多種形式和功能。毫無疑問,大噸位千斤頂的使用,為開拓滑模工藝新領域創造了條件,例如房屋建筑中開拓了滑模與升板相結合的"滑升法"。筒倉施工中,由在倉壁內利用Φ25爬盤滑升改為利用Φ48×3.5腳手管爬升,從而使原來爬行埋在混凝土內不能回收,轉為可以回收,又如當大直徑筒倉采用輻射"輪轂式"支承時,可在筒倉中心部位處增設"帽式井架",在井架內用中心吊掛式千斤頂來輔助筒壁千斤頂滑升,例如由中國建材建設總公司上饒滑模處承建的宿州糧庫5個Φ28m淺圓倉施工中,就采用了此法,解決了柔性平臺操作困難,容易引起庫體失圓,剛性平臺重量大,用鋼量多的矛盾,取得可喜的成功。由江都滑模成套設備廠試成功的GSJD-35型滾珠式升降千斤頂,既能承載上升,又能承載下降,從而使千斤頂只能升不能降,降模施工時被動尷尬的局面,不再成為困擾我們的因素。我們認為在推廣使用大噸位千斤頂同時,小噸位千斤頂仍有其獨特優點,不能概摒棄,更能斥之為因循守舊,正如在鋼筋混凝土結構中,Ⅱ、Ⅲ級高強鋼筋在受力大的梁、柱中被廣泛使用,甚至可用型鋼來代替鋼筋;但受力不大的梁、板中,為了便于架立,有利于抗裂,小直徑的Ⅰ級鋼筋仍有其用武之地一樣。
滑模滑升模板高度選用
滑升模板的高度以1.2m為宜,高度大,將使混凝土對模板的側壓力增大,開字架腿柱處連接焊縫就容易脫開,引起漲模。
滑模技術的最突出特點就是取消了固定模板,變固定死模板為滑移式活動鋼模,從而不需要準備大量的固定模板架設技術,僅采用拉線、激光、聲納、超聲波等作為結構高程、位置、方向的參照系。一次連續施工完成條帶狀結構或構件。
滑模施工難題應對常見問題
滑模不僅包含普通或專用等工具式模板,還包括動力滑升設備和配套施工工藝等綜合技術,主要以液壓千斤頂為滑升動力,在成組千斤頂的同步作用下,帶動1米多高的工具式模板或滑框沿著剛成型的混凝土表面或模板表面滑動,混凝土由模板的上口分層向套槽內澆灌,每層一般不超過30cm厚,當模板內最下層的混凝土達到一定強度后,模板套槽依靠提升機具的作用,沿著已澆灌的混凝土表面滑動或是滑框沿著模板外表面滑動,向上再滑動約30cm左右,這樣如此連續循環作業,直到達到設計高度,完成整個施工。滑模施工技術作為一種現代(鋼筋)混凝土工程結構高效率的快速機械施工方式,在土木建筑工程各行各業中,都有廣泛的應用。只要這些混凝土結構在某個方向是邊界不變化的規則幾何截面,便可采用滑模技術進行快速、高效率的施工制作或生產。在各種規則幾何截面的混凝土結構上,滑模技術顯示出無窮的威力。混凝土結構的施工經濟性和安全性大大提高,施工制作效率成倍增加。
滑模工程技術是我國現澆混凝土結構工程施工中機械化程度高、施工速度快、現場場地占用少、結構整體性強、抗震性能好、安全作業有保障、環境與經濟綜合效益顯著的一種施工技術,通常簡稱為“滑模”。
滑模施工難題應對文獻

 滑模施工
滑模施工
格式:pdf
大小:195KB
頁數: 12頁
評分: 4.6
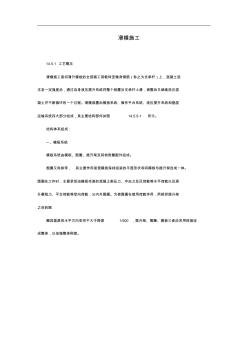
滑模施工 14.5.1 工藝概況 滑模施工是將滑升模板的全部施工荷載轉至墩身鋼筋(稱之為支承桿)上,混凝土澆 注至一定強度后,通過自身液壓提升系統將整個裝置沿支承桿上滑,調整后又繼續澆注混 凝土并不斷循環的一個過程。滑模裝置由模板系統、操作平臺系統、液壓提升系統和垂直 運輸系統四大部分組成,其主要結構部件如圖 14.5.5-1 所示。 結構體系組成: 一、模板系統 模板系統由模板、圍圈、提升架及其他附屬配件組成。 圍圈又稱拱帶, 其主要作用是使模板保持組裝的平面形狀和將模板與提升架連成一體。 圍圈在工作時,主要承受由模板傳遞的混凝土側壓力、沖擊力及風荷載等水平荷載以及滑 升摩阻力、平臺荷載等豎向荷載,分內外圍圈。為使圍圈在使用荷載作用,兩相鄰提升架 之間的圍 圈其垂直和水平方向變形不大于跨度 1/500 ,提升架、圍圈、模板三者應采用栓接連 成整體,以加強整體剛度。 圖 14.5.5-1
 滑模施工 (3)
滑模施工 (3)
格式:pdf
大小:195KB
頁數: 7頁
評分: 4.8
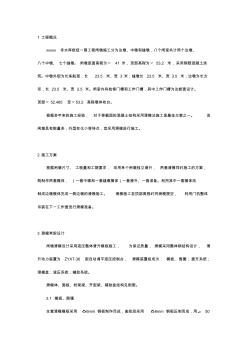
1 工程概況 xxxxx 寺水庫樞紐一期工程閘墩施工分為邊墩、中墩和縫墩,八個閘室共計兩個邊墩、 八個中墩、 七個縫墩。 閘墩底面高程為▽ 41 米,頂部高程為▽ 53.2 米,采用鋼筋混凝土澆 筑。中墩外型為長條船型,長 23.5 米、寬 3 米;縫墩長 23.5 米、寬 3.5 米;邊墩為長方 形,長 23.5 米、寬 2.5 米。閘室內有檢修門槽和工作門槽,其中工作門槽為邊斷面設計。 頂部▽ 52.485 至▽ 53.2 高程墩體收臺。 根據多年來的施工經驗, 對于等截面的混凝土結構采用滑模法施工是最佳方案之一。 該 閘墩具有數量多,外型變化小等特點,宜采用滑模進行施工。 2 施工方案 根據閘墩尺寸、 工程量和工期要求, 采用單個閘墩獨立滑升, 兩套滑模同時施工的方案, 既制作兩套模體, (一套中墩和一套縫墩模體)一套滑升、一套準備。利用其中一套模體改 制成邊墩模體完成一側邊墩的滑模
滑模函數的設計
在系統進入滑動面后能實現某種強制滑模運動,保證滑模具有期望的運動品質。 滑模函數的設計有很多種方法,其中線性滑模設計方法有極點配置法、最優控制法、微分幾何法和李雅普諾夫方法等。另外,近幾年來許多學者對非線性滑模、終端滑模、積分滑模、離散滑模、智能滑模等滑動模態也進行了深入的研究,并取得了一定的成果。
當系統滑動態初始時刻值
即
同理
由上式可知,系統從任意初始狀態運動到達滑模面的時間
系統到達滑模面
兩邊求定積分,得
可以計算系統沿滑模面到達原點的時間
通過計算,可知終端滑模控制器能夠使得系統在有限時間
積分滑模非線性積分滑模控制方法
針對一類不確定非線性系統的滑模控制,提出了一類具有"小誤差放大,大誤差飽和"功能的光滑非線性飽和函數來改進傳統的積分滑模控制,以形成非線性積分滑模控制.在保持傳統積分滑模控制跟蹤精度的同時獲得更好的暫態性能.應用Lyapunov穩定性理論和LaSalle不變性原理證明了對最終常值干擾可以完全抑制.考慮控制受限時,所設計的飽和控制器類似于一種PD 非線性I控制器.最后,仿真算例驗證了非線性積分滑模控制方法的有效性。
積分滑模多機器人的積分滑模編隊控制
以一組非完整約束兩輪機器人為研究對象,提出了具有非匹配不確定性的移動機器人系統的積分滑模編隊控制。在單個機器人運動學模型的基礎上,考慮機器人自身參數變化、打滑和側移等不確定性的影響,采用領航-跟隨機制,建立了編隊系統的動力學模型。該動力學模型含有非匹配不確定性,無法應用積分滑模控制的不變性抑制。在合理的假設下,從理論上證明了具有非匹配不確定的編隊系統在滑模階段具有局部漸近穩定性;證明了積分滑模編隊控制律能夠保證滑模的可達性條件。最后以三個機器人組成仿真實驗平臺,驗證了在非匹配不確定性的了積分滑模編隊控制方法的有效性及可行性。 2100433B
滑模相關推薦
- 相關百科
- 相關知識
- 相關專欄
- 滑模施工
- 滑滑
- 滑石礦床
- 滑移率
- 滑窗算法
- 滕頭園林苗木有限公司湖北分公司
- 滕州力達機床有限公司
- 滕州華潤燃氣有限公司
- 滕州國際家居廣場有限責任公司
- 滕州圖西格斯環保設備有限公司
- 滕州市東沙河雄力機床廠
- 滕州市創金機床有限公司
- 滕州市大正液壓設備有限公司
- 滕州市威科液壓設備有限公司
- 滕州市建設工程造價管理處
- 滕州市德能機床廠
- 應對水源突發污染的城市供水應急處理技術與應用
- 政府投資建設項目在財務管理上面臨的風險和應對措施
- 政府投資工程類項目材料設備采購風險淺析及應對策略
- 中博會展中心C1區鋼結構屋面大型主桁架的施工技術
- 因工程施工、設備維修等原因確需停止供水審批申請表
- 中國水利水電第十六工程局有限公司機場施工發展戰略
- 張峰水庫2號倒虹預應力鋼筒混凝土管道安裝施工工藝
- 指路標志(分流、合流誘導標)施工記錄
- 中廣核貴州龍里風電場升壓站建筑物裝飾裝修施工方案
- 引綽濟遼工程遠距離輸水隧洞TBM施工三維數值模擬
- 園林景觀及配套設施標工程施工組織設計建筑施工
- 再談VRV空調系統設計與施工中有關問題的解決方法
- 異形柱框架及短肢墻抗震節點構造的施工質量保證措施
- 昭待高速公路路面預防性養護工程施工總結-推薦下載
- 整體平移后六層磚混結構住宅樓整體提升的施工與監測
- 影響我國公路橋梁板式橡膠支座質量的因素及應對措施
最新詞條
安徽省政采項目管理咨詢有限公司
數字景楓科技發展(南京)有限公司
懷化市人民政府電子政務管理辦公室
河北省高速公路京德臨時籌建處
中石化華東石油工程有限公司工程技術分公司
手持無線POS機
廣東合正采購招標有限公司
上海城建信息科技有限公司
甘肅鑫禾國際招標有限公司
燒結金屬材料
齒輪計量泵
廣州采陽招標代理有限公司河源分公司
高鋁碳化硅磚
博洛尼智能科技(青島)有限公司
燒結剛玉磚
深圳市東海國際招標有限公司
搭建香蕉育苗大棚
SF計量單位
福建省中億通招標咨詢有限公司
泛海三江
威海鼠尾草
Excel 數據處理與分析應用大全
廣東國咨招標有限公司
甘肅中泰博瑞工程項目管理咨詢有限公司
拆邊機
山東創盈項目管理有限公司
當代建筑大師
廣西北纜電纜有限公司
大山檳榔
上海地鐵維護保障有限公司通號分公司
舌花雛菊
甘肅中維國際招標有限公司
華潤燃氣(上海)有限公司
湖北鑫宇陽光工程咨詢有限公司
GB8163標準無縫鋼管
中國石油煉化工程建設項目部
韶關市優采招標代理有限公司
莎草目
建設部關于開展城市規劃動態監測工作的通知
電梯平層準確度
廣州利好來電氣有限公司
四川中澤盛世招標代理有限公司