

利用光電編碼器和PLC高速計數器進行定位控制
格式:pdf
大小:419KB
頁數:7P
人氣 :98
 4.6
4.6
利用光電編碼器和 PLC 高速計數器進行定位控制 [作者:武麗 轉貼自:微計算機信息 點擊數: 97 更新時間: 2008-8-4 【字體: A 】 Study of Multipoint Position and Reciprocating Motion Control Based on PLC Abstract: Multipoint position problem will be involved usually in reciprocating drive control system. Tha t is , different position set different mechanical action will be requested. But account of action of mech anical inertia, position error wi



 光電編碼器LED光源的準直
光電編碼器LED光源的準直 光電編碼器LED光源的準直
格式:pdf
大小:1.1MB
頁數:7P
由于發光二極管(led)光束的準直度對光電編碼器性能影響很大,研究了led光束的準直特性。分析了光源輻射角對光柵光通量的影響;運用圖像旋轉理論和頻域分析方法,導出了莫爾條紋透光特性函數式,揭示了光源準直度參數對莫爾條紋函數特性的影響。獲得了與光束準直度相關的不同透光縫寬度下的莫爾條紋仿真波形,分析了光源準直特性指標對莫爾條紋對比度以及光柵間隙的影響。理論計算結果表明,當透光縫寬度減小5μm時,莫爾條紋圖像的對比度下降17.66%,實驗結果與理論仿真波形吻合,表明文中提出的莫爾條紋函數式可為高精度和高可靠性編碼器設計和生產提供參考。
光電編碼器脈沖檢測電路設計 光電編碼器脈沖檢測電路設計
格式:pdf
大小:806KB
頁數:3P
螺紋加工是數控車床重要的加工功能,要保證螺紋的加工精度,必須準確的獲取主軸角位置信號。為此設計了螺紋脈沖檢測電路,其中整形電路采用sn75115雙重微分接受器去除共模干擾,鑒相及同步控制用74ls74d觸發器組成,也解決了低速大螺距加工問題。該電路經實際應用驗證是可靠的。
編輯推薦下載
光電編碼器電路原理分析 光電編碼器電路原理分析
格式:pdf
大小:281KB
頁數:2P
4.4
本文以光電編碼器為例介紹了數控檢測系統的種類,詳細分析了光電編碼器的結構原理。分析szlf-102.4bm-c05l光電脈沖編碼器電路原理,把機械轉角通過光電轉換元件將變化的光信號轉換成近似正弦波的電信號,然后由放大電路、整形電路、經頻率---電壓變換器變成正比于頻率的電壓,作為速度反饋信號,供給速度控制單元,進行速度調節。
無線電定位接收機中高速計數器的設計及其FPGA實現 無線電定位接收機中高速計數器的設計及其FPGA實現
格式:pdf
大小:353KB
頁數:未知
4.5
在無線電定位接收機信號處理中,為了準確的測量toa,對計數器的計數精度有極高的要求。本文提出了一種利用常用邏輯器件,結合現場可編程器件實現200mhz甚至更高頻率的高速計數器的方法,并與計算機接口。該計數器可用于高精度的toa,pw測量等方面。
光電編碼器和PLC高速計數器進行定位控制熱門文檔
光電編碼器的單片機減振電路設計 光電編碼器的單片機減振電路設計
格式:pdf
大小:485KB
頁數:4P
4.3
分析了光電編碼器的振動機理及影響,設計了用單片機進行控制的減振電路。并用fpga模擬單片機減振電路,給出其仿真波形,從而驗證了單片機減振電路的實用性。
基于光電編碼器的相對轉角測量系統 基于光電編碼器的相對轉角測量系統
格式:pdf
大小:170KB
頁數:4P
4.7
光電編碼器具有精度高、響應快、性能穩定可靠等顯著特點,經常被用于測量轉角和轉速.在介紹相對轉角測試系統組成結構和工作原理基礎上,針對光電編碼器抖動對轉角測量精度的影響,本文提出一種綜合利用定時方式和d觸發器的抖動抑制方法,并給出以fpga為控制芯片的具體實現方案.通過實驗證明,該方法具有良好的穩定性和可靠性.
光電編碼器選型及同步電機轉速和轉子位置測量 光電編碼器選型及同步電機轉速和轉子位置測量
格式:pdf
大小:317KB
頁數:4P
4.4
光電軸角編碼器,又稱光電角位置傳感器,是電氣傳動系統中用來測量電動機轉速和轉子位置的核心部件。對絕對式、增量式和混合式光電軸編碼器的工作原理進行了綜述,介紹了光電軸編碼器的選型原則、轉子速度的測量和轉子位置的測量方法。最后,給出了同步電動機變頻調速系統中轉速和轉子位置測量系統的實現。

光電計數器設計
格式:pdf
大小:894KB
頁數:31P
4.6
目錄 摘要...........................................................................................錯誤!未定義書簽。 目錄.............................................................................................................................i 一、緒論.................................................................................錯誤!未定義書簽。 1.1概述.....................................................
基于增量光電編碼器的智能車速度控制器設計 基于增量光電編碼器的智能車速度控制器設計
格式:pdf
大小:290KB
頁數:未知
4.7
為了提高智能車的快速性和穩定性,必須精確檢測車的速度,并有效控制車的速度;由此設計基于增量光電編碼器速度檢測脈沖四倍頻器電路,以atmega128單片機為控制核心、mc33886pwm橋式功放為電機驅動器的速度控制系統;詳細介紹了增量光電編碼器及四倍頻電路,控制器的環路、硬件構成、工作原理、控制策略、軟件流程;最后提供了仿真數據、實驗結論。通過實驗可知,編碼器應用得當、系統控制效果較好,能滿足一般要求,從而驗證了該方法理論的正確性和可行性。
光電編碼器和PLC高速計數器進行定位控制精華文檔
基于CPLD的光電編碼器四倍頻電路的設計 基于CPLD的光電編碼器四倍頻電路的設計
格式:pdf
大小:338KB
頁數:未知
4.4
在工業測控系統中,光電編碼器用于測量電機的角位移。由于現場的干擾以及光電編碼器的高分辨率的特點,常運用四倍頻電路來提高被控電機的測量精度和控制精度。設計基于可編程邏輯器件cpld,利用cpld的可重構性,在系統可編程以及能夠實現復雜邏輯功能的特點,設計了光電編碼器信號的四倍頻電路。測試結果表明,這種方法實用有效,實現了四倍頻、鑒相和計數功能,具有成本低、設計靈活的優點,提高了電機的控制精度。
基于單片機和增量式光電編碼器脈沖檢測電路的設計 基于單片機和增量式光電編碼器脈沖檢測電路的設計
格式:pdf
大小:450KB
頁數:4P
4.6
通過脈沖計數狀態電路設計和計數狀態的識別,給出了增量式光電編碼器脈沖計數的新方法,有效地防止了誤碼計數,提高了檢測系統的抗干擾能力。
用PLC高速計數器和電壓/頻率傳感器測量模擬電壓信號的方法 用PLC高速計數器和電壓/頻率傳感器測量模擬電壓信號的方法
格式:pdf
大小:323KB
頁數:3P
4.5
介紹了用plc高速計數器和電壓/頻率傳感器累計測量脈沖的原理,闡明了應用中需注意的事項,通過程序實例詳實介紹了測量模擬電壓信號的方法。
基于光電編碼器的電機變周期速度觀測器設計 基于光電編碼器的電機變周期速度觀測器設計
格式:pdf
大小:355KB
頁數:未知
4.5
針對光電編碼器在伺服系統應用中速度估計易受系統振動干擾和存在量化誤差的問題,設計了一種基于變采樣周期觀測器的速度估計算法.通過觀測器的積分運算抑制振動干擾;通過采樣周期和光電編碼器脈沖的同步,使量化誤差最小;為了減小觀測器離散域極點變化對算法性能的影響,保證變周期觀測器在較大速度范圍保持較高精度,給出了一種觀測器增益系數的計算方法.實驗表明該算法可以在保證動態性能的同時,有效抑制振動和量化誤差引起的估計誤差,提高速度估計精度.
光電編碼器和PLC高速計數器進行定位控制最新文檔
基于SOC單片機的高集成度光電編碼器電路設計 基于SOC單片機的高集成度光電編碼器電路設計
格式:pdf
大小:94KB
頁數:1P
4.7
隨著科技的發展和工作水平的提升,光電編碼器的設計走向了精密化的角度,同時需要在電路設計上從多個角度出發,進行階段化的革新.基于soc單片機的高集成度光電編碼器,是當前比較流行的編碼器類型,但是在電路設計上則需要深入的推敲.文章就此展開討論,并提出合理化建議.
基于SOC單片機的高集成度光電編碼器電路設計 基于SOC單片機的高集成度光電編碼器電路設計
格式:pdf
大小:551KB
頁數:6P
4.6
提出了減小光電編碼器電路部分空間,縮小其結構尺寸的方法,并對編碼器的電路處理進行了研究。介紹了光電編碼器的基本原理、光電信號特點和信號處理的要求,分析了傳統電路處理方案的特點,說明了基于放大器和比較器的傳統方案是造成電路結構設計體積較大的原因。為改變傳統方案,提出了用ad直通處理和分時驅動光電信號采集技術來代替傳統硬件設置從而有效壓縮電路部分空間的方法。介紹了編碼器高集成度電路設計的實現原理,并設計了一種16位小型編碼器,其電路板面積為415mm2,,編碼器體積僅為ф25mm×16mm。設計實驗表明,基于soc單片機的高集成度光電編碼器電路設計技術使用元器件少、電路簡單、集成度高,可有效壓縮傳感器電路部分的空間。
模數轉換器AD7874在光電編碼器高速數據采集系統中的應用 模數轉換器AD7874在光電編碼器高速數據采集系統中的應用
格式:pdf
大小:608KB
頁數:3P
4.7
介紹了高性能模數轉換器ad7874的芯片特性、時序和工作原理。介紹了ad7874在光電軸角編碼器高速數據采集系統中的應用,給出了其與ti公司c54x系列dsp的硬件接口原理及工作方式,并進行了軟件設計,最后給出結論。
光電計數器設計輔導
格式:pdf
大小:389KB
頁數:4P
4.4
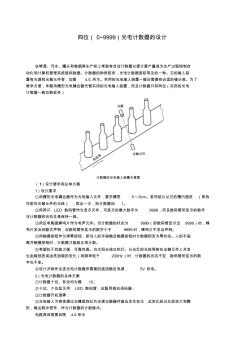
四位(0~9999)光電計數器的設計 在啤酒、汽水、罐頭和卷煙等生產線上常裝有自動計數器以便計算產量或為生產過程控制自 動化和計算機管理系統提供數據。計數器的種類較多,光電計數器是較常見的一種。它的輸入裝 置有光源和光敏元件等,如圖4.5所示。實用的光電輸入裝置一般還需要有合適的鏡頭等。為了 教學方便,本題用槽形光電耦合器代替實用的光電輸入裝置,而且計數器只有兩位(實用的光電 計數器一般位數較多) 計數器的光電輸入裝置示意圖 (1)設計要求和總體方案 1)設計要求 ①用槽形光電耦合器作為光電輸入元件,要求槽寬5~6cm。若將紙片從它的槽內插進(即擋 住射向光敏元件的光線),取出一次,則計數器加1。 ②用兩只led數碼管作為顯示元件,可顯示的最大數字為9999,而且數碼管所顯示的數字 與計數器的狀態總是保持一致。 ③用壓電陶瓷蜂鳴片作為電聲元件。當計數器的狀態為9999
直流電機光電編碼器信號的測量及處理 直流電機光電編碼器信號的測量及處理
格式:pdf
大小:148KB
頁數:未知
4.4
本論文主要內容是講移動機器人電機控制,包含速度控制,轉向點控制。選用的光電編碼器有三相輸出,判別電機的轉動方向。在相位判斷的過程中我們采用了一個雙上升沿d觸發器,其型號為cc4013
 智能矩陣式光電編碼器速度加速度測量方法研究
智能矩陣式光電編碼器速度加速度測量方法研究 智能矩陣式光電編碼器速度加速度測量方法研究
格式:pdf
大小:253KB
頁數:未知
4.7
針對智能型矩陣式絕對光電軸角編碼器,以mcs51單片機(stc89c52)為核心單片機,設計了一種編碼器速度、加速度測量儀。根據智能矩陣式光電編碼器的輸出要求,采用雙485通信結構,解決了遠距離傳輸問題的同時,實現了全雙工工作狀態。通過實時采集并處理編碼器輸出數據,實現其速度、加速度實時準確快速測量。最后經多次實驗證明,設計的測量儀器運行準確、快速,能夠應用于實際測量中。
西門子PLC與編碼器使用 (2)
格式:pdf
大小:513KB
頁數:9P
4.6
應用于高速計數模塊的編碼器基礎 1編碼器基礎 光電編碼器 編碼器是傳感器的一種,主要用來檢測機械運動的速度、位置、角度、距離和計數等,許 多馬達控制均需配備編碼器以供馬達控制器作為換相、速度及位置的檢出等,應用范圍相 當廣泛。按照不同的分類方法,編碼器可以分為以下幾種類型: 根據檢測原理,可分為光學式、磁電式、感應式和電容式。 根據輸出信號形式,可以分為模擬量編碼器、數字量編碼器。 根據編碼器方式,分為增量式編碼器、絕對式編碼器和混合式編碼器。 光電編碼器是集光、機、電技術于一體的數字化傳感器,主要利用光柵衍射的原理來實現 位移——數字變換,通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖或數字量的傳 感器。典型的光電編碼器由碼盤、檢測光柵、光電轉換電路(包括光源、光敏器件、信號 轉換電路)、機械部件等組成。光電編碼器具有結構簡單、精度高、壽命長等優點,廣泛 應用于精密定位、速度、長度
西門子PLC與編碼器使用
格式:pdf
大小:512KB
頁數:11P
4.7
應用于高速計數模塊的編碼器基礎 1編碼器基礎 1.1光電編碼器 編碼器是傳感器的一種,主要用來檢測機械運動的速度、位置、角度、距離和計數等,許 多馬達控制均需配備編碼器以供馬達控制器作為換相、速度及位置的檢出等,應用范圍相 當廣泛。按照不同的分類方法,編碼器可以分為以下幾種類型: 根據檢測原理,可分為光學式、磁電式、感應式和電容式。 根據輸出信號形式,可以分為模擬量編碼器、數字量編碼器。 根據編碼器方式,分為增量式編碼器、絕對式編碼器和混合式編碼器。 光電編碼器是集光、機、電技術于一體的數字化傳感器,主要利用光柵衍射的原理來實現 位移——數字變換,通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖或數字量的傳 感器。典型的光電編碼器由碼盤、檢測光柵、光電轉換電路(包括光源、光敏器件、信號 轉換電路)、機械部件等組成。光電編碼器具有結構簡單、精度高、壽命長等優點,廣泛 應用于精密定位、速度
PLC與文本屏、編碼器、變頻器程序實例之一
格式:pdf
大小:633KB
頁數:12P
4.5
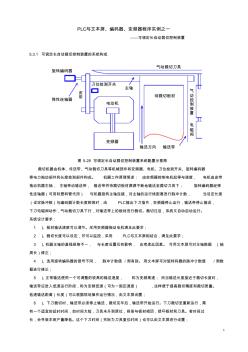
1 plc與文本屏、編碼器、變頻器程序實例之一 ——可調定長自動裁切控制裝置 5.3.1可調定長自動裁切控制裝置的系統構成 電動機 變頻器 皮 帶 旋轉編碼器 彈性連軸器 氣動裁切刀具 輸送帶 待裁切板材 主軸 氣 動 控 制 裝 置 電 磁 閥 輸送方向 刀位檢測開關 圖5-28可調定長自動裁切控制裝置系統配置示意圖 裁切機器由機體、傳送帶、氣動裁切刀具等機械部件和變頻器、電機、刀位檢測開關、旋轉編碼器 等電力拖動部件和長度檢測部件構成。機器工作原理簡述:由變頻器控制電機起停與速度,電機由皮帶 拖動機器主軸,主軸帶動輸送帶,輸送帶將待裁切板材源源不斷地輸送至裁切刀具下;旋轉編碼器經彈 性連軸器(可用軟塑料管代用)與機器旋轉主軸連接,對主軸的運行線距離進行脈沖計數,當設定長度 (設定脈沖數)與編碼器計數長度相等時,由plc輸出下刀指令,變頻器停止運行,輸送帶停止輸
光電編碼器和PLC高速計數器進行定位控制相關
文輯推薦
知識推薦
百科推薦


職位:水利工程規劃工程師
擅長專業:土建 安裝 裝飾 市政 園林


