

光電編碼器選型及同步電機轉速和轉子位置測量
格式:pdf
大小:317KB
頁數:4P
人氣 :60
 4.4
4.4
光電軸角編碼器,又稱光電角位置傳感器,是電氣傳動系統中用來測量電動機轉速和轉子位置的核心部件。對絕對式、增量式和混合式光電軸編碼器的工作原理進行了綜述,介紹了光電軸編碼器的選型原則、轉子速度的測量和轉子位置的測量方法。最后,給出了同步電動機變頻調速系統中轉速和轉子位置測量系統的實現。



 基于光電編碼器的相對轉角測量系統
基于光電編碼器的相對轉角測量系統 基于光電編碼器的相對轉角測量系統
格式:pdf
大小:170KB
頁數:4P
光電編碼器具有精度高、響應快、性能穩定可靠等顯著特點,經常被用于測量轉角和轉速.在介紹相對轉角測試系統組成結構和工作原理基礎上,針對光電編碼器抖動對轉角測量精度的影響,本文提出一種綜合利用定時方式和d觸發器的抖動抑制方法,并給出以fpga為控制芯片的具體實現方案.通過實驗證明,該方法具有良好的穩定性和可靠性.
用光電傳感器測量電機轉速 用光電傳感器測量電機轉速
格式:pdf
大小:160KB
頁數:未知
基于傳感器的轉速測量方法較多,總體分為模擬式和數字式兩種。本文重點研究數字式測量方法。針對光電傳感器的原理進行簡單介紹,并說明它是如何對電機轉速進行測量的。通過實驗得到的結果進行了數據分析,用最小二乘法擬合出了線性表達式。
編輯推薦下載
無刷同步電機轉子電流測量及旋轉整流器故障檢測裝置的研究 無刷同步電機轉子電流測量及旋轉整流器故障檢測裝置的研究
格式:pdf
大小:366KB
頁數:未知
4.8
無刷勵磁電機的轉子電流、電壓等不能直接測量,整流器的故障也無法直接監測。本文設計了一種以單片機為核心的發電機勵磁系統故障監測裝置,可以自動監測發電機轉子電流和整流器的故障
直流電機光電編碼器信號的測量及處理 直流電機光電編碼器信號的測量及處理
格式:pdf
大小:148KB
頁數:未知
4.4
本論文主要內容是講移動機器人電機控制,包含速度控制,轉向點控制。選用的光電編碼器有三相輸出,判別電機的轉動方向。在相位判斷的過程中我們采用了一個雙上升沿d觸發器,其型號為cc4013
光電編碼器選型及同步電機轉速和轉子位置測量熱門文檔
光電編碼器LED光源的準直 光電編碼器LED光源的準直
格式:pdf
大小:1.1MB
頁數:7P
4.5
由于發光二極管(led)光束的準直度對光電編碼器性能影響很大,研究了led光束的準直特性。分析了光源輻射角對光柵光通量的影響;運用圖像旋轉理論和頻域分析方法,導出了莫爾條紋透光特性函數式,揭示了光源準直度參數對莫爾條紋函數特性的影響。獲得了與光束準直度相關的不同透光縫寬度下的莫爾條紋仿真波形,分析了光源準直特性指標對莫爾條紋對比度以及光柵間隙的影響。理論計算結果表明,當透光縫寬度減小5μm時,莫爾條紋圖像的對比度下降17.66%,實驗結果與理論仿真波形吻合,表明文中提出的莫爾條紋函數式可為高精度和高可靠性編碼器設計和生產提供參考。
光電編碼器脈沖檢測電路設計 光電編碼器脈沖檢測電路設計
格式:pdf
大小:806KB
頁數:3P
4.4
螺紋加工是數控車床重要的加工功能,要保證螺紋的加工精度,必須準確的獲取主軸角位置信號。為此設計了螺紋脈沖檢測電路,其中整形電路采用sn75115雙重微分接受器去除共模干擾,鑒相及同步控制用74ls74d觸發器組成,也解決了低速大螺距加工問題。該電路經實際應用驗證是可靠的。
光電編碼器電路原理分析 光電編碼器電路原理分析
格式:pdf
大小:281KB
頁數:2P
4.4
本文以光電編碼器為例介紹了數控檢測系統的種類,詳細分析了光電編碼器的結構原理。分析szlf-102.4bm-c05l光電脈沖編碼器電路原理,把機械轉角通過光電轉換元件將變化的光信號轉換成近似正弦波的電信號,然后由放大電路、整形電路、經頻率---電壓變換器變成正比于頻率的電壓,作為速度反饋信號,供給速度控制單元,進行速度調節。
光電編碼器的單片機減振電路設計 光電編碼器的單片機減振電路設計
格式:pdf
大小:485KB
頁數:4P
4.3
分析了光電編碼器的振動機理及影響,設計了用單片機進行控制的減振電路。并用fpga模擬單片機減振電路,給出其仿真波形,從而驗證了單片機減振電路的實用性。
基于光電編碼器的電機變周期速度觀測器設計 基于光電編碼器的電機變周期速度觀測器設計
格式:pdf
大小:355KB
頁數:未知
4.5
針對光電編碼器在伺服系統應用中速度估計易受系統振動干擾和存在量化誤差的問題,設計了一種基于變采樣周期觀測器的速度估計算法.通過觀測器的積分運算抑制振動干擾;通過采樣周期和光電編碼器脈沖的同步,使量化誤差最小;為了減小觀測器離散域極點變化對算法性能的影響,保證變周期觀測器在較大速度范圍保持較高精度,給出了一種觀測器增益系數的計算方法.實驗表明該算法可以在保證動態性能的同時,有效抑制振動和量化誤差引起的估計誤差,提高速度估計精度.
光電編碼器選型及同步電機轉速和轉子位置測量精華文檔
電機轉速轉矩計算公式
格式:pdf
大小:63KB
頁數:8P
4.3
針對你的問題有公式可參照分析: 電機功率:p=1.732×u×i×cosφ 電機轉矩:t=9549×p/n; 電機功率轉矩=9550*輸出功率/輸出轉速 轉矩=9550*輸出功率/輸出轉速 p=t*n/9550 公式推導 電機功率,轉矩,轉速的關系 功率=力*速度 p=f*v---公式1 轉矩(t)=扭力(f)*作用半徑(r)推出 f=t/r---公式2 線速度(v)=2πr*每秒轉速(n秒)=2πr*每分轉速(n分)/60=πr*n 分/30---公式3 將公式2、3代入公式1得: p=f*v=t/r*πr*n分/30=π/30*t*n
利用光電編碼器和PLC高速計數器進行定位控制
格式:pdf
大小:419KB
頁數:7P
4.6
利用光電編碼器和plc高速計數器進行定位控制 [作者:武麗轉貼自:微計算機信息點擊數:97更新時間:2008-8-4 【字體:a】 studyofmultipointpositionandreciprocatingmotioncontrolbasedonplc abstract:multipointpositionproblemwillbeinvolvedusuallyinreciprocatingdrivecontrolsystem.tha tis,differentpositionsetdifferentmechanicalactionwillberequested.butaccountofactionofmech anicalinertia,positionerrorwi
基于單片機和增量式光電編碼器脈沖檢測電路的設計 基于單片機和增量式光電編碼器脈沖檢測電路的設計
格式:pdf
大小:450KB
頁數:4P
4.6
通過脈沖計數狀態電路設計和計數狀態的識別,給出了增量式光電編碼器脈沖計數的新方法,有效地防止了誤碼計數,提高了檢測系統的抗干擾能力。

步進電機和編碼器
格式:pdf
大小:14KB
頁數:1P
4.7
1,步進電機為什么要加編碼器。 步進電機是執行原件,編碼器屬于反饋系統,編碼器配合步進電機使用, 用plc控制其運行~ 按照原理來講是plc發送脈沖指令給步進驅動器,驅動器給步進電機提供相應 電流使其運行,當編碼器檢測到步進電機運行到需要到達的位置的時候會反饋信 號給plc,plc安裝反饋的信號停止發送脈沖信號給步進驅動器,當步進電機 沒有了電動原提供電流當然也會立刻停止運行。(伺服電機就是此種裝置),其 實編碼器會不停的反饋當前位置給plc,plc根據反饋值與目標值進行比較, 調整轉子轉動的角度。 當然會不會停穩,停止后是不是自己想要的位置,這個要看電機有無 制動裝置?當然低速運行的話,一般進給精度都能滿足~ 還有一種就是提前計算好步進電機進給需要的脈沖數,然后用plc編程,運行 這么多脈沖數,步進電機停止,編碼器反饋此時電機位置,形成半

電機轉速與頻率的公式
格式:pdf
大小:1.4MB
頁數:5P
4.3
1 電機轉速與頻率的公式 n=60f/p 上式中 n——電機的轉速(轉/分); 60——每分鐘(秒); f——電源頻率(赫芝); p——電機旋轉磁場的極對數。 我國規定標準電源頻率為f=50周/秒,所以旋轉磁場的轉速的大小只與磁極對數有關。磁極對數多,旋轉磁場的轉速成就低。 極對數p=1時,旋轉磁場的轉速n=3000; 極對數p=2時,旋轉磁場的轉速n=1500; 極對數p=3時,旋轉磁場的轉速n=1000; 極對數p=4時,旋轉磁場的轉速n=750; 極對數p=5時,旋轉磁場的轉速n=600 (實際上,由于轉差率的存在,電機.實際轉速略低于旋轉磁場的轉速) 在變頻調速系統中,根據公式n=60f/p可知: 改變頻率f就可改變轉速 降低頻率↓f,轉速就變小:即60f↓/p=n↓ 增加頻率↑f,轉速就加大:即60
光電編碼器選型及同步電機轉速和轉子位置測量最新文檔
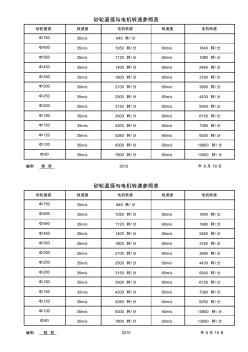
砂輪直徑與電機轉速參照表
格式:pdf
大小:26KB
頁數:1P
4.6
砂輪直徑與電機轉速參照表 砂輪直徑線速度電機轉速線速度電機轉速 φ75035m/s840轉/分 φ60035m/s1050轉/分60m/s1840轉/分 φ56035m/s1120轉/分60m/s1980轉/分 φ45035m/s1400轉/分60m/s2460轉/分 φ35035m/s1800轉/分60m/s3160轉/分 φ30035m/s2100轉/分60m/s3690轉/分 φ25035m/s2500轉/分60m/s4430轉/分 φ20035m/s3150轉/分60m/s5540轉/分 φ18035m/s3500轉/分60m/s6150轉/分 φ15035m/s4200轉/分60m/s7380轉/分 φ12035m/s5260轉/分60m/s925
智能矩陣式光電編碼器速度加速度測量方法研究 智能矩陣式光電編碼器速度加速度測量方法研究
格式:pdf
大小:253KB
頁數:未知
4.7
針對智能型矩陣式絕對光電軸角編碼器,以mcs51單片機(stc89c52)為核心單片機,設計了一種編碼器速度、加速度測量儀。根據智能矩陣式光電編碼器的輸出要求,采用雙485通信結構,解決了遠距離傳輸問題的同時,實現了全雙工工作狀態。通過實時采集并處理編碼器輸出數據,實現其速度、加速度實時準確快速測量。最后經多次實驗證明,設計的測量儀器運行準確、快速,能夠應用于實際測量中。
模數轉換器AD7874在光電編碼器高速數據采集系統中的應用 模數轉換器AD7874在光電編碼器高速數據采集系統中的應用
格式:pdf
大小:608KB
頁數:3P
4.7
介紹了高性能模數轉換器ad7874的芯片特性、時序和工作原理。介紹了ad7874在光電軸角編碼器高速數據采集系統中的應用,給出了其與ti公司c54x系列dsp的硬件接口原理及工作方式,并進行了軟件設計,最后給出結論。
基于SOC單片機的高集成度光電編碼器電路設計 基于SOC單片機的高集成度光電編碼器電路設計
格式:pdf
大小:94KB
頁數:1P
4.7
隨著科技的發展和工作水平的提升,光電編碼器的設計走向了精密化的角度,同時需要在電路設計上從多個角度出發,進行階段化的革新.基于soc單片機的高集成度光電編碼器,是當前比較流行的編碼器類型,但是在電路設計上則需要深入的推敲.文章就此展開討論,并提出合理化建議.
基于SOC單片機的高集成度光電編碼器電路設計 基于SOC單片機的高集成度光電編碼器電路設計
格式:pdf
大小:551KB
頁數:6P
4.6
提出了減小光電編碼器電路部分空間,縮小其結構尺寸的方法,并對編碼器的電路處理進行了研究。介紹了光電編碼器的基本原理、光電信號特點和信號處理的要求,分析了傳統電路處理方案的特點,說明了基于放大器和比較器的傳統方案是造成電路結構設計體積較大的原因。為改變傳統方案,提出了用ad直通處理和分時驅動光電信號采集技術來代替傳統硬件設置從而有效壓縮電路部分空間的方法。介紹了編碼器高集成度電路設計的實現原理,并設計了一種16位小型編碼器,其電路板面積為415mm2,,編碼器體積僅為ф25mm×16mm。設計實驗表明,基于soc單片機的高集成度光電編碼器電路設計技術使用元器件少、電路簡單、集成度高,可有效壓縮傳感器電路部分的空間。
基于增量光電編碼器的智能車速度控制器設計 基于增量光電編碼器的智能車速度控制器設計
格式:pdf
大小:290KB
頁數:未知
4.7
為了提高智能車的快速性和穩定性,必須精確檢測車的速度,并有效控制車的速度;由此設計基于增量光電編碼器速度檢測脈沖四倍頻器電路,以atmega128單片機為控制核心、mc33886pwm橋式功放為電機驅動器的速度控制系統;詳細介紹了增量光電編碼器及四倍頻電路,控制器的環路、硬件構成、工作原理、控制策略、軟件流程;最后提供了仿真數據、實驗結論。通過實驗可知,編碼器應用得當、系統控制效果較好,能滿足一般要求,從而驗證了該方法理論的正確性和可行性。
利用光電脈沖編碼器測量氣柜柜容的裝置 利用光電脈沖編碼器測量氣柜柜容的裝置
格式:pdf
大小:123KB
頁數:1P
4.7
柜容監測是保證氣柜安全運行的重要控制措施,傳統柜容測量無法滿足現代化生產多參數,高性能的監測要求,本文提出了一種利用光電脈沖編碼器、自動校正傳感器、觸摸屏和s7-200plc等器件設計組成的柜容測量裝置。詳細介紹了該柜容測量裝置的系統組成、功能特點、主要部件、性能參數及在安裝選用方面的相關知識和注意事項,可廣泛應用于氣柜柜容自動化監測。

同步電機
格式:pdf
大小:73KB
頁數:6P
4.4
第五篇同步電機 5.1同步電機和異步電機在結構上有哪些區別? 5.2什么叫同步電機?怎樣由其極數決定它的轉速?試問75r/min、50hz的電機是幾 極的? 5.3為什么現代的大容量同步電機都做成旋轉磁極式? 5.4汽輪發電機和水輪發電機的主要結構特點是什么?為什么有這樣的特點? 5.5傘式和懸式水輪發電機的特點和優缺點如何?試比較之。 5.6為什么水輪發電機要用阻尼繞組,而汽輪發電機卻可以不用? 5.7一臺轉樞式三相同步發電機,電樞以轉速n逆時針方向旋轉,對稱負載運行時, 電樞反應磁動勢對電樞的轉速和轉向如何?對定子的轉速又是多少? 5.8試分析在下列情況下電樞反應的性質。 (1)三相對稱電阻負載; (2)純電容性負載8.0cx,發電機同步電抗0.1tx; (3)純電感性負載7.0lx; (4)純電容性負載2.1cx,同步電抗0.1tx。 5.
發電機抽轉子施工步驟
格式:pdf
大小:5KB
頁數:1P
4.5
發電機抽轉子施工步驟 1.發電機抽轉子前的檢查 1.1檢查發電機兩側上端蓋、上瓦已拆除,下端蓋的下瓦已更換為轉子支架。 1.2檢查發電機轉子兩側風葉已拆除。 1.3檢查發電機定子兩側汽隙擋板已拆除。 1.4檢查發電機轉子與汽輪機轉子靠背輪已脫開,轉子已向勵側移動25.4mm左右。 1.5檢查勵側風扇噴咀有關的靜葉環已拆除。 1.6檢查轉子磁極中心(大齒)處于垂直中心線位置。 1.7檢查發電機勵側軸頭上轉子牽引工具已安裝好。 1.8檢查在發電機汽側轉子支撐在轉子支架上,軸頸保護完好。 1.9檢查在發電機勵側轉子支撐在轉子支架上,軸頸保護完好。 1.10檢查滑板已打過蠟,清潔無雜物。 1.11檢查滑塊已打過蠟,清潔無雜物,綁扎牢固。 1.12檢查穿繩子的8號線已用塑料帶扎好,光滑無毛刺。 1.15檢查兩側預放置轉子的弧形枕木已準備好,檢查包裹發電機轉子用的銅皮、紙板已準
光電編碼器選型及同步電機轉速和轉子位置測量相關
文輯推薦
知識推薦
百科推薦

職位:幕墻BIM設計師
擅長專業:土建 安裝 裝飾 市政 園林


